1. Table of Contents
1. Table of Contents
2. Abstract (JS)
3. Introduction (AK)
4. Aims and Objectives (JF)
5. Literature Review (AD, AK, GC, JS, JF, MM, SC)
6. Methodology (JS)
7. Hierarchical Task Analysis (MM, JS)
8. eVTOL Operational Design and Performance
– 8.1. Design Constraints
– – 8.1.1. Aerodynamics and Energy Limits (SC)
– – 8.1.2. Weather Sensitivity (SC)
– – 8.1.3. Safety, Certification and Air Traffic Integration (SC)
– – 8.1.4. Noise Reduction (SC)
– – 8.1.5. Human Centred Engineering
– – – 8.1.5.1. ISO 9241-210 (MM)
– – – 8.1.5.2. Anthropometrics (MM)
– – – 8.1.5.3. Regional Differences (AD)
– – – 8.1.5.4. Regulatory Implementation (AK)
– 8.2. Infrastructure Needs (SC)
– – 8.2.1. Heliports and Vertiports (SC)
– – 8.2.2. Designated and Existing Infrastructure (SC)
– – 8.2.3. Power and Safety (SC)
– 8.3. Performance (SC)
– – 8.3.1. Range and Payload (SC)
– – 8.3.2. Operational Turnaround (SC)
9. Operational Safety Requirements
– 9.1. Human Factors and Training: Operator Training, Passenger Briefings and Automation Reliance (JF)
– 9.2. Air Traffic Control (JF)
– 9.3. Flight Safety and Emergency Procedures (JF)
– 9.4. Weather and Environmental Monitoring (JF)
– 9.5. Secure Communication (JF)
– 9.6. Sensor Fusion Applied to eVTOL Navigation (GC)
– – 9.6.1. Introduction (GC)
– – 9.6.2. Relevant eVTOL Navigation Sensors (GC)
– – – 9.6.2.1. Cameras
– – – 9.6.2.2. LiDAR
– – – 9.6.2.3. RADAR
– – 9.6.3. Sensor Network (GC)
– – 9.6.4. Application of Sensor Fusion in eVTOL DAS (GC)
– 9.7. Regulatory Implementation of Operational Safety Requirements (AK)
10. Infrastructure
– 10.1. Application
– – 10.1.1. Passenger Safety and Information (JS)
– – 10.1.2. Vertiport and Flight Coordination (JS)
– – 10.1.3. Energy and Charging Management (JS)
– – 10.1.4. Cybersecurity and Reliability (JS)
– 10.2. Charging and Energy Infrastructure
– – 10.2.1. Meeting eVTOLs’ High-Capacity Demands (JS)
– – 10.2.2. Supporting High-Traffic eVTOL Operations Through Infrastructure (JS)
– 10.3. Structural and Environmental Design (JS)
– – 10.3.1. Materials and Systems (JS)
– – 10.3.2. Air Corridors (JS)
– 10.4. Safety and Emergency System
– – 10.4.1. Evacuation Pathways and Structural Safety (JS)
– 10.5. Pedestrian and Ground Safety (JS)
– – 10.5.1. Restricted Access and Buffer Zones (JS)
– – 10.5.2. Extreme Weather and Sound Pollution Measures (JS)
– 10.6. Regional Differences (AD)
– 10.7. Regulatory Implementation on Infrastructure (AK)
– – 10.7.1. Urban Sustainability
– – 10.7.2. Storage Regulations
– – 10.7.3. Building Regulations
– – 10.7.4. Urban Area Integration
11. Conclusion (MM)
– 11.1. Project Review (MM)
– 11.2. Optimised Design (MM)
– 11.3. Future Work (MM, JS)
12. Bibliography
2. Abstract
This research paper explores the future integration of electrical Vertical Take Off and Landing (eVTOL) systems into metropolitan areas. This article aims to identify and predict the safety measures required for effective and sustainable eVTOL adaptation. To minimise risks and ensure efficient operational management, the article presents various perspectives and subsequent methods. Included in it are the following: design and performance, operational safety requirements, infrastructure, human-centred engineering, legal and regional aspects. Despite limitations in timeframe and available technical data, this work is a contribution of all team members to provide a comprehensive foundation for future research and eVTOL integration.
3. Introduction
Aerial eVTOL taxis fall into the Advanced Air Mobility (AAM) sector, a breakout industry in the last 5-7 years with a rise in the widespread use of drones in commercial and military use, such as the use of UAVs (Labib et al., 2021). This rapid increase in the use of aerial technology has seen it become a viable alternative for commercial travel due to the increasing population density within major cities, which has led to a rise in congestion and pollution when using traditional roads (Xiang et al., 2023). This has led to the belief that aerial taxis can be engineered as the solution to a growing social and technological dilemma. The movement into AAM is believed to be safe, efficient and reliable if designed correctly.
To gauge the suitability of the use of eVTOLS as aerial taxis, it is necessary to analyse the design constraints, the drawbacks and the necessity to facilitate the concept of human-centred engineering in design, as well as the subsequent infrastructure developments required to facilitate the integration of this new technology into modern cities. The safety precautions and considerations are also of imperative importance to ensure the smooth adaptation of eVTOLs to prevent unintended and unwanted disasters.
4. Aims and Objectives
AIMS
This paper advocates for integrating an eVTOL network within an urban environment by examining key elements, including design, infrastructure and safety, through a human-centred approach. By emphasising human-centred design and safety, this paper aims to provide a safe and optimised framework for urban air mobility.
OBJECTIVES
– Formulate a clear and detailed Hierarchical Task Analysis (HTA) framework that is focused on human-centred design to enforce user safety and satisfaction.
– Evaluate possible infrastructure and technology to optimise user safety while constructing a cohesive eVTOL network.
– Expand operational safety requirements and performance measures through the integration of flight procedures, sensor fusion and regulatory frameworks to support the deployment of eVTOLs in an urban environment.
5. Literature Review
To begin with, the paper by Schweiger and Preis (2022) was a vital resource for our research on eVTOLs in transportation, providing a broad review of many scientific papers and regulations surrounding key infrastructure for air taxis. It combines almost 50 publications, dives into critical design factors and compares different international regulations. It provides a strong framework for future research by identifying areas where more research is needed. Moreover, the UAM vision concept operation (ConOps), provided by Deloitte Consulting LLP, helped us understand the demands of sustaining an eVTOL. The article provided by NASA in 2020 focuses in depth on specific concepts, factors and ideas to consider before issuing eVTOLs into urban environments.
6. Methodology
In this research analysis paper, a qualitative data approach was adopted to assess the required information for the feasibility of eVTOL integration. Due to limitations in data, the article relies primarily on secondary sources, such as academic reports, safety standards (eg, ISO-9241-210), government documents, infrastructure and regulations. In the early stages of its making, eVTOL projects and urban air mobility were precisely studied to identify practical challenges.
To provide further analysis, a HTA was conducted to align passenger safety to legal and operational requirements. The key findings were divided into categories such as design, human-centred engineering, operational safety, infrastructure, legal and regional requirements.
The deadline for producing this project was four weeks, limiting the depth of this research. Furthermore, lack of access to primary data and short timeframes constrained the scope of our investigation. The findings that our analysis is based on are derived from industry reports, authoritative sources and verified articles, including NASA publications.
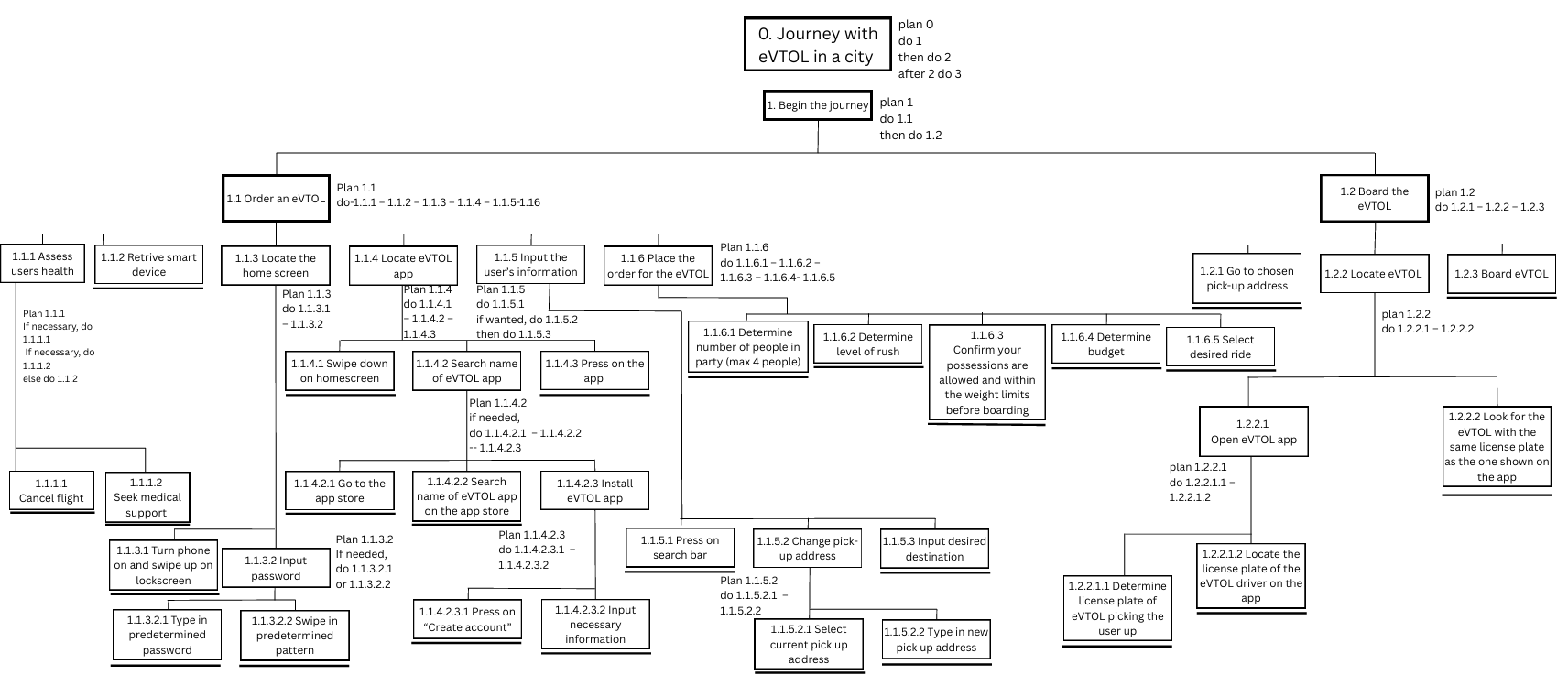
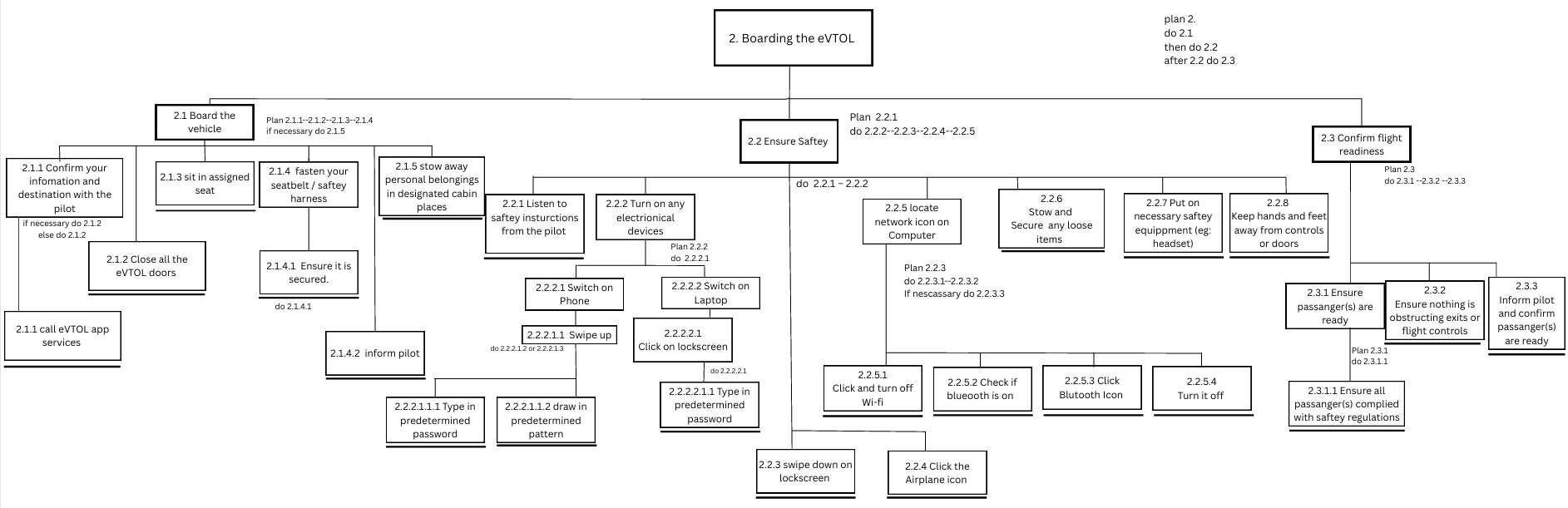
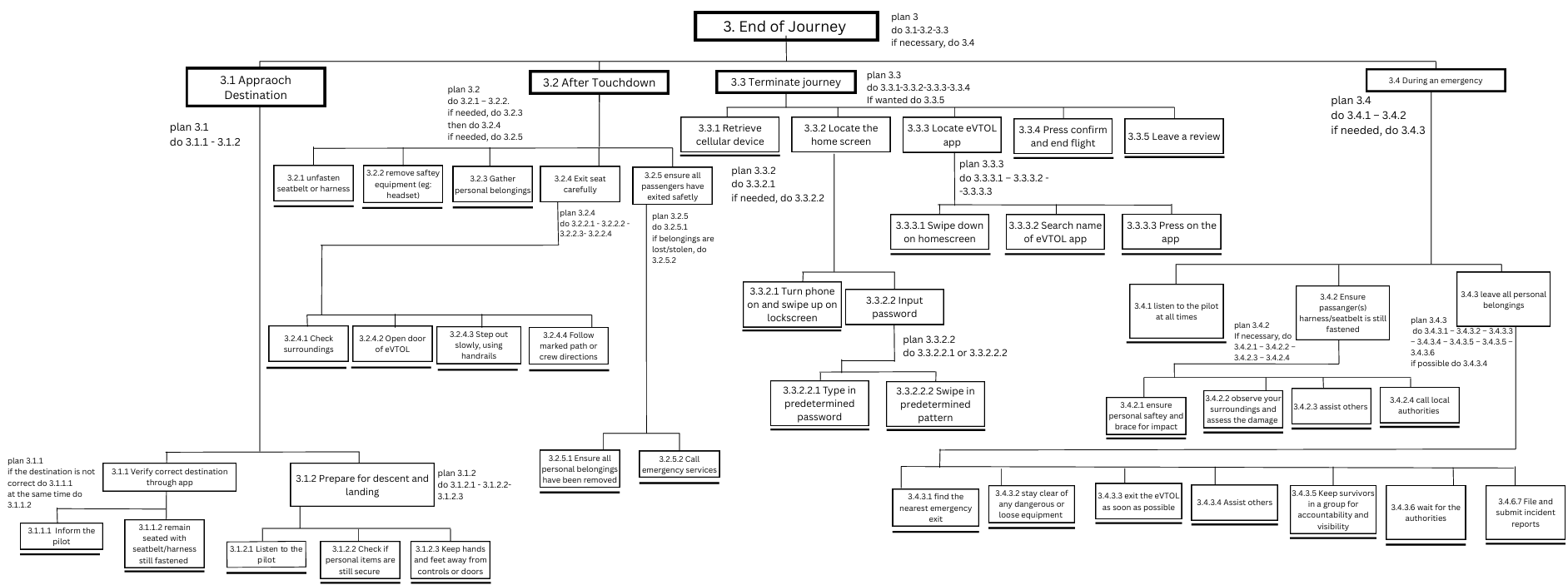
7. Hierarchical Task Analysis
8. eVTOL Operational Design and Performance
8.1. Design Constraints
8.1.1. AERODYNAMICS AND ENERGY LIMITS
eVTOL performance is constrained by limited range, battery energy density and payload capacity. Aerodynamic efficiency and noise reduction must be balanced for urban usage (Brunelli et al., 2023). Gas-powered VTOLs do not suffer from energy density challenges, as traditional aircraft fuels are more energy dense than current battery designs. There are various designs, including wingless designs (e.g., multicopter drones), fixed-wing hybrid designs (e.g., tilt rotors) and tilt wings. A hybrid design is more optimal for energy efficiency and long distances (Wang, et al., 2023).
8.1.2. WEATHER SENSITIVITY
eVTOLs are highly susceptible to changes in weather. Wind, precipitation and turbulence can impact the vehicle’s performance. To operate an eVTOL safely, strict operational safety protocols are necessary (Andrade et al., 2022).
8.1.3. SAFETY, CERTIFICATION AND AIR TRAFFIC INTEGRATION
Many certification challenges arise from new technologies such as eVTOLs. Novel propulsion systems, distributed electric motors and battery reliability all must be certified and safe for users. Aside from the physical aspect of the eVTOL, existing air traffic control systems must coordinate with all of these vehicle operations. New protocols for low-altitude Urban Air Mobility (UAM) corridors/rule sets will also be required (Brunelli et al., 2023).
8.1.4. NOISE REDUCTION
A key constraint for the acceptance of eVTOLS in an urban space is noise levels. Acceptance of this new technology relies on the fact that eVTOLs can have a significantly smaller noise footprint than helicopters. One way to reduce noise levels is by switching from a strictly business-oriented scenario, which follows the shortest flight path, to a noise-priority scenario, which follows a path through the least populated areas (Schweiger & Preis, 2022; Jeong et al., 2021). Using the noise-priority flight path showed a 76.9% decrease in people affected by high noise levels (Jeong et al., 2021).
8.1.5. Human Centred Engineering
8.1.5.1. ISO 9241-210
ISO 9241-210 provides a human-centred process (e.g., iterative design, stakeholder involvement and staged evaluation) that reduces error and cognitive load for pilots and improves clarity and comfort for passengers. Applied to eVTOLs, it guides cockpit control/display layout, procedures and briefings; for passengers, it supports intuitive boarding, accessible seating and clear safety information. Embedding these practices early links usability to safety and public trust – key to urban air mobility acceptance.
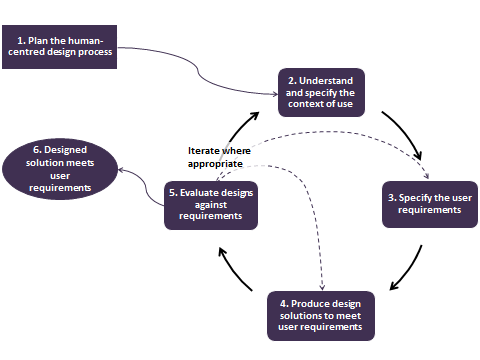
Image 1: Human Centred Design Process (Fuglerud, 2014).
8.1.5.2. ANTHROPOMETRICS
Using anthropometric data in the design of an eVTOL cabin ensures the cabin space accommodates a wide range of body sizes. The weight distribution, with males ranging from approximately 61.5-124.1 kg and females from 50.2-113.8 kg, directly affects structural load capacity and seating strength. Standing height data, with males ranging from 163-188.2 cm and females ranging from 150.7-173.7 cm, impacts headroom, seat positioning and the placement of controls to avoid crowding or discomfort. Circumference and limb length measurements, such as waist, arm and leg dimensions, alter seat width, spacing and reach accessibility for controls. Overall, these measurements support a cabin design that is both safe and ergonomic for pilots and passengers across the 5th to 95th percentile of adults (aged 20 and above) in the U.S. (Fryar, Gu & Ogden, 2012).
8.1.5.3. REGIONAL DIFFERENCES
To expand the global usage of eVTOLs, the hottest and coldest countries in the world with decent population size would have been examined, but data for Russia and the Middle East was either restricted or inaccessible, so Kenya and Belgium were picked (Li et al., 2023). They were selected because of their extreme temperatures that are similar to Russia’s cold and the Middle East’s heat.
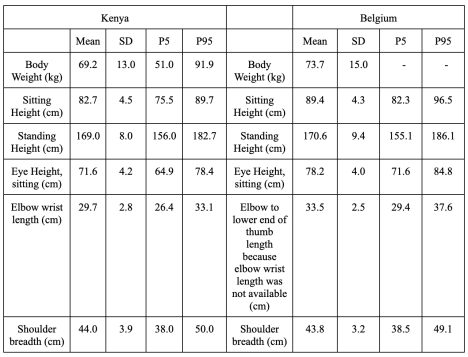
Table 1: Anthropometrics of Kenya and Belgium (Mailutha et al., 2007).
The data in Table 1 shows that while the width of the eVTOLs in Kenya and Belgium would be less than eVTOLs in the U.S. due to lower mean body weights, their height would likely be more as the height ranges of people in Kenya and Belgium are greater. Hence, the eVTOLs need to be engineered to carry taller and lighter people in Kenya and Belgium when compared to the United States. Additionally, the eVTOLs in Kenya would require a coolant-based system and eVTOLs in Belgium would require instant heating services due to the climates of these two countries.
8.1.5.4. REGULATORY IMPLEMENTATION
When considering the legal imperatives of eVTOL designs in the context of human-centred engineering, it is essential to account for the necessary adaptations and incorporations to ensure equal and universal access to and operation of eVTOLs. The UKCAA encourages proactive integration of human factors, such as the processing of information, age and anthropometric data ranging from cockpit to operations, to account for human oversight at every stage. Findings have shown that AI implementation can be a key factor in being able to account for human-centred design in eVTOLs to help procure regulatory guidance when considering design and performance of eVTOLs (Flores, Ziakkas & Delisle, 2023).
8.2. Infrastructure Needs
8.2.1. Heliports and Vertiports
A key aspect of eVTOL infrastructure is the vertiport. Vertiports must include safety buffers, passenger facilities, charging or battery-swapping systems and integration with air traffic management (Schweiger & Preis, 2022). To avoid any collisions in the air, air traffic management could adopt the Traffic Collision Avoidance System (TCAS). This system helps avoid collisions, supports Beyond Visual Line of Sight (BVLOS) operations and integrates with unmanned traffic management systems. Within the TCAS system, resolution advisory detection is being adapted for aircraft without onboard pilots. In summary, heliports and vertiports would serve as the central areas for all eVTOL operations, including charging, air traffic management and passenger mobilisation.
8.2.2. Designated and Existing Infrastructure
Operations will primarily rely on airports, heliports and rooftop helipads. Smaller-scale landing sites, such as neighbourhood vertiports in parking lots or garages, can be used to expand the network of takeoff and landing sites (Andrade et al., 2022). Rooftops, helipads and multi-level car parks have to be adapted for eVTOL use to meet structural load requirements and safety codes (O’Reilly et al., 2024). Reinforcements to the structures will be necessary for rooftops and parking lots to support the weight of eVTOLs and ensure safe take-off/landing zones (Brunelli et al., 2023). External elevators can be used to support the mobilisation of passengers from ground level to vertiports on the top of tall buildings. These elevators enable passengers to bypass the lobby, as they are used solely for accessing the rooftop. Response Spectrum Analysis (RSA) can be used to assess how different elevator placements within the building impact its safety and seismic performance (Shi et al., 2024).
Additionally, charging infrastructure should be available at every vertiport and heliport location. There are many solutions for charging, such as fast charging and battery swapping. A challenge to this is getting the infrastructure on top of tall buildings; therefore, more research should be done to incorporate this efficiently. São Paulo, with its extensive helipad network, is a prime example of a place where eVTOL operations can be tested (O’Reilly et al., 2024).
8.2.3. Power and Safety
To ensure adequate safety precautions, facilities must incorporate fire suppression systems, evacuation routes and security protocols for all operations. To achieve safe integration into urban environments, quiet propulsion and redundancy in power systems are needed. The design of the vertiport is also crucial to passenger safety. A safe vertiport must provide sufficient surface and load-bearing qualities while being clear of any obstructive obstacles. In the U.S., the Federal Aviation Administration (FAA) heliport design guidelines may help in creating similar guidelines for vertiport designs: “the FAA is building the basis for the most ongoing vertiport research” (Schweiger & Preis, 2022). Several charging methods, such as direct charging of the battery pack and battery swapping, can be used to provide power to the eVTOLs. The key differences are that battery swapping changes the depleted battery pack for a fully charged one, while direct charging replenishes the charge.
8.3. Performance
8.3.1. Range and Payload
Limited by current battery technology, eVTOLs primarily target short- to medium-range urban missions within a range of 30-50 km. A successful eVTOL must support the high energy demands of takeoff and landing while being able to cruise during flight, which has high energy consumption (Wang et al., 2023). The design of the aircraft is critical for mitigating low power density, with hybrid configurations offering greater efficiency and payload potential than wingless multicopter designs (Wang et al., 2023). Using an efficient design can help extend range and increase payload capabilities. There are two main designs: a wingless configuration and a hybrid configuration. The wingless design seen in drones does not provide enough efficiency for longer-range applications. Hybrid-configuration designs, in contrast, have the potential to become more efficient than wingless designs. Hybrid-configuration designs comprise three subsections: lift and cruise; tilt-rotor; and tilt-wing (Wang et al., 2023). This configuration is more complex and introduces additional factors that can impact flight, manoeuvrability and efficiency.
8.3.2. Operational Turnaround
The most important factor surrounding the efficiency and commercial viability of an eVTOL taxi system is the charging. As mentioned previously, there are two leading solutions for charging: direct charging or battery swapping. One key benefit of battery swapping is the shorter turnaround time (TOT); the downside is increased costs and complexity.
Alternatively, direct charging, which has longer turnaround times and increases demand on the power grid, is significantly more cost-effective and easier to implement. Therefore, direct battery charging is currently the most feasible option (Schweiger & Preis, 2022). Additionally, renewable energy can be utilised to reduce the costs of an eVTOL and lower the demand on the power grid, resulting in increased electricity availability and faster charge times: “compared to traditional aircraft, the UAM shows a different cost breakdown, especially in terms of operating costs, where the lower cost of the electric energy reduces the usual value due to the fuel cost” (Fioriti et al., 2024).
9. Operational Safety Requirements
9.1. Human Factors and Training: Operator Training, Passenger Briefings and Automation Reliance
The effective implementation of successful human factors and training is essential to the safety and efficiency of the eVTOL systems in an urban environment. Operators must be able to confidently manage aircraft systems, automations and workload, while maintaining a strong level of situational awareness. Training must include the standard instruction of eVTOLs and their systems, but also a strong focus on automated aviation environments. Pilots must be prepared to sufficiently operate the aircraft in the event of system failure to maintain safety (Edwards et al., 2019). To support this structure, tools such as virtual reality simulators can help pilots develop proficiency with the eVTOL systems through simulated environments and controls. Additionally, passenger briefings are displayed before every flight to ensure that passengers are informed and prepared in the unlikely event of an emergency. These briefings will cover the various safety procedures, protocols and systems that should be utilised in the event of an emergency aboard the aircraft to maintain the safety of everyone on board.
9.2. Air Traffic Control
Integrating the use of eVTOLs into modern airspace requires the use of advanced Air Traffic Control (ATC) systems that exceed standard aviation frameworks. Urban air involves high-density air traffic and a large number of aircraft within the given system. Urban Air Traffic Management (UATM) is a promising alternative to standard ATC as it utilises satellite-based navigation, automated conflict detection and dynamic airspace allocation to create a series of safe routes for each aircraft (FAA, 2020; Schuchardt et al., 2023). Unlike traditional ATC methods, which involve human controllers, UATM systems utilise real-time data and algorithms to prevent collisions between aircraft automatically. When operating at lower altitudes, eVTOLs are tasked with navigating around varying buildings and terrain, making continuous tracking through tools such as ADS-B and satellite links essential to maintain the safety of the aircraft and its environment.
Additionally, the use of predictive modelling and a digital twin of airspace allows ground operators to predict conflict and test flight patterns. This will reduce the cognitive workload entrusted to human operators, minimising the risk of accidents and danger within the system. Through the combination of real-time surveillance, predictive modelling and scaling, automated conflict resolution will enable the eVTOLs within an urban environment to maintain safe air traffic control.
9.3. Flight safety and emergency procedures
Flight safety and emergency procedures are the core standards that allow eVTOLs to be safely integrated in an urban environment. Flight increases the exposure to problems such as turbulence, mid-air collisions and power system failures. To properly mitigate these risks, Distributed Electric Propulsion (DEP) systems can be utilised to ensure that the aircraft is still manoeuvrable in the event of a motor or rotor failure on one part of the aircraft (Franciscone & Fernandes, 2023). Additionally, other safety measures may include ballistic recovery parachutes and the implementation of Kevlar composites to protect passengers in the case of a crash landing. In the event of citywide issues, such as power outages or GPS jamming, eVTOLs must rely on redundant navigational systems to maintain operational safety. These systems may include vision-based guidance or inertial measurement units so that operators can function in the absence of external support. Clear emergency protocols, such as prioritising landing at designated emergency vertiports, are essential to maintaining the safety of individuals within the eVTOL system. Additionally, individual automated monitoring of systems such as batteries, propulsion and system performance allows for immediate implementation of corrective measures if any abnormalities are detected.
9.4. Weather and environmental monitoring
The surrounding weather and environment are crucial factors to consider when evaluating the safety and efficiency of an eVTOL system. Schweiger et al. (2023) examined the vertiports in Hamburg and Munich, which experienced an abundance of wind-related cancellations during the first quarter of the year, accounting for over 50% of annual flight cancellations. Using this information, operators should adapt a framework centred around predicting weather conditions through predictive modelling, dynamic scheduling and localised sensing. Doppler Light Detection and Ranging (LiDAR) can be utilised to provide operators with continuous three-dimensional wind profiling on an urban scale. This LiDAR can not only detect turbulence, but also wind shear near tall buildings, which is a common hazard in urban environments (Liu et al., 2019).
Additionally, Sonic Detection and Ranging (SoDAR) systems provide acoustic wind measurements at lower altitudes, as well as wind direction and atmospheric turbulence. UAV-based micro-weather probes can transmit data on temperature, humidity and pressure, providing a more comprehensive analysis of current weather conditions. X-band and C-band weather radars are optimal tools for detecting localised rain intensity and icing conditions, all of which can affect variables such as visibility and lift-off (Farooq et al., 2021). Global Navigation Satellite System (GNSS)-based barometric correction systems can be used to provide accurate vertical profiling, accounting for temperature and density changes that occur with altitude alterations. Using 3D models of the terrain and building geometry, operators can establish safe and effective flight corridors throughout an urban environment.
9.5. Secure communication
Maintaining secure communication within an eVTOL environment is essential to the safety and overall function of the system. These operations require near-perfect reliability with a given 10 ms latency response time for command-and-control (C2) traffic. To fulfil these requirements, Radio Access Network (RAN) slicing can be utilised to separate different network tasks and flows. This reduces the risk of interference and attacks, although the SDN/NFV controllers must be protected with proper authentication. Utilising millimeter-wave (mmWave) frequencies, coupled with directional beamforming, can help provide increased data rates for passengers while also controlling services and maintaining resilience against interception and breaching. To achieve safe travel within airspace, sidelink (device-to-device) communication can be utilised between eVTOLs to facilitate fast, decentralised data exchanges, thereby avoiding collisions even if central networks are compromised (Zaid et al., 2023). The eVTOL systems should be able to interact with 5G network bands by taking advantage of 5G end-to-end slicing to provide air-to-ground connectivity.
9.6. Sensor Fusion applied to eVTOL navigation
9.6.1. Introduction
Sensors are essential for safety in every aspect; however, if a sensor outputs incorrect information, it could lead to a worse outcome than having no sensors at all. In 2018, a Lion Air Boeing 737 MAX experienced a failure in the Angle of Attack (AoA) sensor, which was the only input for the Manoeuvring Characteristics Augmentation System (MCAS). In this case, the sensor was faulty, causing the aircraft to dive and eventually crash. Had a network of sensors been used, the faulty sensor would have been easily identified, and the crash could have been prevented.
9.6.2. Relevant eVTOL navigation sensors
9.6.2.1. CAMERAS
Cameras can provide high-resolution imagery and colours if implemented correctly, but require the right amount of visible light. Monocular cameras, like the ones used in mobile phones, can be used to read signs and detect abnormal shapes on the landing pad (such as a person walking through the pad), but they require complex algorithms to do more than that. Binocular cameras use two lenses and mimic the depth perception of animals. Using less complex algorithms, this type of camera can estimate distance, but the algorithm can still be data-heavy; if used extensively, it might compromise performance and quality (this type of camera offers the same benefits as a monocular camera and more). There are also fisheye cameras, which are used for observation of the near surroundings as they provide a 360° field of view (FOV), but share with monocular cameras the need for complex algorithms for distance measurement (Yeong et al., 2021).
9.6.2.2. LIDAR
LiDAR is most commonly used in topographical mapping of terrain. It works by emitting pulses of infrared light and recording the time interval between emission and reception, which is used for estimating distance and shape. This information is then put into a 3D point cloud, which, at a basic perspective, can be seen as a digital representation of the environment. LiDARs can be one-, two- or three-dimensional. In 1D, they only emit light in one dimension, meaning that they can only calculate the distance between the sensor and the object. In 2D, they emit light in two dimensions, meaning that they can now perceive angles as well. Lastly, in 3D, it fires light in three dimensions, meaning that it can now perceive the elevation of objects. These machines can also be categorised as mechanical (moving) and solid-state LiDAR (SSL). The mechanical LiDAR has a moving lens, driven by an electric motor, that moves according to what is needed to capture, providing it with a 360° FOV. The SSL does not have a moving lens, meaning it avoids mechanical failure, but sacrifices FOV (some variants have up to 120° FOV) (Yeong et al., 2021). LiDARs, like cameras, are also affected by weather conditions and illumination, although not as significantly. A study conducted by Kutila et al. (2016) showed that performance might degrade by 25% when facing these conditions, which must be taken into account.
9.6.2.3. RADAR
RADAR operates on a similar principle to LiDAR; it emits radio waves and records the time it takes to receive the signal, which can be used to estimate distance and shape (which can also be put into a 3D point cloud). Due to the Doppler effect, they can also calculate the relative velocity. RADARs, unlike LiDARs and cameras, have almost no problems when working in environments with severe weather conditions and/or too much or too little illumination (Yeong et al., 2021). However, a 2021 study conducted by Yeong et al. showed a high number of false positives when RADARs detected shapes in the area of interest, indicating that RADARs require additional information inputs to verify their own readings, thus sensor fusion is preferable.
9.6.3. Sensor Network
When fused, each of the described sensors mitigates the other’s weaknesses. Cameras provide high resolution and detail, LiDARs provide depth and environment shape, and RADARs ensure robustness when the environment is degraded and estimate relative speed. For the eVTOLs, the fusion of these three main sensors and many more (such as the pitot tube) ensures redundant and reliable information for the many processes involved in the operation of eVTOLs as taxis.
Elmenreich (2002) categorises sensor fusion into three main types: competitive, complementary and cooperative. Competitive is when sensors are confirming the same property (e.g., RADAR and LiDAR detecting their surroundings). Complementary is when sensors do not depend on each other to provide information, but when put together, provide a more complete picture of the whole (e.g., one camera observing the starboard and another facing the port side). Lastly, a cooperative sensor fusion is when sensors combine their information to form something none of the sensors could sense alone (e.g., a pitot tube outputting velocity and a LiDAR outputting distance fuse their information and output a time to collision).
9.6.4. Application of sensor fusion in eVTOL DAS
A Detect and Avoid System (DAS) is central for operations in densely urban spaces, but it requires a high level of precision and timing. This whole system cannot rely on a single sensor to input information, or a disaster like the Lion Air crash could happen again. For that reason, sensor fusion is required for safe operations.
Navigation and inertial sensor fusion ensure continuous, redundant and reliable information for the DAS algorithms, which not only understand obstacles but also calculate and execute avoidance manoeuvres. Furthermore, in close-range and low-response-time environments (the main occasions where DAS is used), obstacle avoidance requires quick and reliable avoidance mechanisms, which need sensor fusion.
Cooperative networks improve DAS performance, as eVTOLs share sensed data and predicted trajectories. This reduces collision risk and supports integration with the ATC systems. In this way, DAS is not only an onboard algorithm problem, but also a system dependent on sensor information, where fusion ensures reliability and robustness.
9.7. Regulatory Implementation of Operational Safety Requirements
With the integration of eVTOLs into public commercial use, a robust legal framework will be necessary to ensure the safe and streamlined operation of eVTOLs in terms of air traffic control. The UK Civil Aviation Authority (UKCAA), European Union Aviation Safety Agency (EUASA) and the FAA are key regulatory bodies that would suggest the required laws to ensure the safe running of eVTOLS. The UKCAA, following research with the University of Warwick, has found:
- Airspace integration challenges: Air navigation service providers should implement mechanisms to detect and alert controllers/service providers to deviations in aircraft performance (e.g., altitude, speed and trajectory) from expected parameters.
- Vertiport operational standards: The criticality of energy management requires ground services to use advanced real-time sensors to ensure the provision of continuous feedback on landing conditions.
- Automation and simulation oversight: There are currently no mandated protocols for using automation and simulation tools to detect performance deviations or predict flight path conflicts (UKCAA, 2025).
Although there is a limited legal framework for eVTOLs at this current moment in time, it is continually being researched and developed by bodies such as the UKCAA, EASA and FAA to match the current rate of eVTOL development progression.
10. Infrastructure
10.1. Application
10.1.1. Passenger safety and information
For eVTOLs to function correctly in an urban environment, their application must provide real-time communication to the passengers, operators and pilots. This includes air-to-air links and air-to-ground links, enabling efficient UAM through software-defined networking. In emergencies, passengers, nearby people and relevant services are informed of flight changes, evacuation routes and ground safety measures via mobile devices. This ensures that emergency procedures are accessible and understandable. To protect individuals without network access, non-digital aids such as public announcements, visual cues and trained ground personnel will provide any alerts or changes, ensuring safety for all (Hill et al., 2020).
10.1.2. Vertiport and flight coordination
A practical eVTOL application must anticipate both operational and infrastructural difficulties. This includes: restricted vertiport access, high air traffic density, unpredictable flight manoeuvres and limited battery capacities. To sustain on-demand UAM, the application should be frequently updated with algorithms that model trips and dynamic route changes. By systematically managing limited vertiport capacity and monitoring air corridor challenges, the application can ensure safe and efficient traveling for new demands over time (Hill et al., 2020).
10.1.3. Energy and Charging Management
As eVTOLs are integrated into urban areas, applications need to ensure aircraft availability during emergencies. This requires quick coordination with vertiports to provide real-time updates on charging availability. In an eVTOL, the Battery Management System (BMS) should be coordinated with the application, as it will detect problems such as overheating or overcurrent, alerting operators in the event of danger. Additionally, apps can coordinate with vertiports to automatically reserve charging slots, especially in dire need. According to Ratei et al. (2024), a maximum of 80% of the battery should suffice for a discharge; this means that when an eVTOL’s battery reaches 20%, the app should automatically control the plane to the nearest available vertiport as an automatic override to ensure eVTOL safety.
10.1.4. Cybersecurity and reliability
When satellite frequencies, such as those used in SATCOM antennas and Automatic Dependent Surveillance Broadcasts (ADS-B), are employed to track an eVTOL’s position, implementing cybersecurity in eVTOLs is crucial. To prevent threats, a blockchain supported by a public key infrastructure (PKI) ensures the development of a secure airspace. Moreover, an internal navigation system (INS) will be installed to serve as a backup to the GPS in cases of satellite jamming or spoofing. The eVTOL application then plays a critical role in monitoring the interconnections, securing and authenticating both the broadcast links and users. During a potential threat, the app immediately informs the pilot and nearby operators, providing frequent updates and warnings to ensure cybersecurity for both the aircraft and its passengers.
10.2. Charging and Energy Infrastructure
10.2.1. Meeting eVTOLs’ High-Capacity Demands
Unlike ground EVs, eVTOLs have higher capacities and power demands, requiring efficient energy management. Consequently, vertiports must be equipped with reliable and scalable energy grids that are high-capacity and can be expanded over time. When handling high amounts of electricity, a vertiport’s ability to conserve and efficiently use energy becomes crucial. To enhance power efficiency, vertiports should feed excess energy from charging back into the electrical grid.
The primary objective of a vertiport is to effectively and rapidly replenish batteries between flights. Therefore, in the event of a spike in demand or a grid failure, vertiports equipped with backup power systems, such as on-site battery storage and microgrids, will meet unexpected energy needs, providing continuous and smooth flying for eVTOLs. Regarding backup power systems, health and human services also highlight the importance of backup systems, emphasising their essential role in disaster resilience in the event of emergencies (Axios, 2024).
10.2.2. Supporting High-Traffic eVTOL operations through infrastructure
Vertiports in high-traffic environments must also minimise turnaround times to ensure rapid charging, boarding and clearance. Efficient TOTs are critical for maintaining sustainable high-traffic vertiport operations. In the event of emergency demands, Doo (2023) emphasises the efficiency of turnarounds, speaking of their usefulness for first-responder and medical transport missions. Consequently, by ensuring robust and adaptable infrastructure, vertiports can support operational needs, including emergency procedures and disaster response, to maintain safe and continuous eVTOL operations.
10.3. Structural and Environmental Design
10.3.1. Materials and Systems
The incorporation of different materials and systems in a vertiport can result in better structural safety and urban integration. When considering a vertiport’s urban integration, potential threats such as battery fires and failures, hot landing components and sparks must be accounted for. To address these potential hazards, FAA Advisory Circular 150/5390-2C (Heliport Design) specifies the need for fire-resistant surfaces, labelling it essential for vertiport safety. To further enhance safety, the incorporation of impact-resistant and debris-absorbing surfaces will result in a reduction of accidents and risks to local buildings and inhabitants. Together, these measures provide sustainable and practical support for eVTOL operations, developing the durability and sustainability of vertiports for their integration into urban environments.
10.3.2. Air corridors
The positioning of air corridors in an urban environment is essential for integrating eVTOLs into metropolitan areas. Typically, the lowest altitude of a corridor is measured relative to the highest building in the city. However, this approach can disproportionately impact cities where the tallest building is significantly higher than the median building height. To avoid this issue, planners should incorporate a ratio to adjust the corridor based on the difference between the tallest building and the median. When air corridors are properly measured, cities with tall skyscrapers and low buildings will not be forced to implement extremely high air corridors, balancing efficient urban management with eVTOL safety.
10.4. Safety and Emergency System
10.4.1. Evacuation Pathways and Structural Safety
Evacuation of masses of people from either a vertiport or eVTOLs requires thoughtful planning, coordination and infrastructure to ensure pedestrian safety. Although situations may differ, immediate evacuation, as mentioned in Section 3.4 of the HTA, is crucial for providing safety to passengers, operators and pilots. Built-in ramps, evacuation routes and designated stairways with up-to-date communications through an operative eVTOL application (as mentioned in Section 10.2.1) will ensure quick and efficient removal from any hazards. The evacuation pathways and safety zones should be separated from danger, properly lit, clearly visible and easily accessible to ensure smooth situational control.
10.5. Pedestrian and Ground Safety
10.5.1. Restricted Access and Buffer Zones
For eVTOL integration to be both safe and reliable, ground restriction zones are essential in busy urban environments. Similar to drones, eVTOLs must comply with no-fly zones tailored to the city’s personal requirements, preventing operations over private or sensitive areas. To prevent such accidents, digital geofencing technology ensures eVTOLs’ compliance with no-fly zones, and if necessary, autonomous takeover will ensure safety by steering the eVTOL away from the restricted area. According to the FAA and EASA regulatory frameworks, a Safety Area (SA) is critical in a vertiport for supporting eVTOL safety for both pedestrians and operators. Designers must adapt an SA to the city’s density and scale, creating visible signs, vertical barriers, lighting and signage that is visible both during the day and night. The size of an SA should be based on the aircraft’s maximum dimensional value (D-value), ensuring a sufficient buffer that is optimal for a vertiport’s operation. In addition to the SA, other buffer zones, such as Final Approach and Takeoff Area (FATO) and Touchdown and Lift-Off Area (TLOF), are crucial for an eVTOL’s integration. By incorporating defined and visible buffer zones, vertiports ensure minimal public resistance to eVTOLs, thereby ensuring their smooth and safe operation in an urban environment.
10.5.2. Extreme weather and sound pollution measures
To protect both the facility and its surrounding environment, vertiports should adapt to unexpected weather and noise pollution. To mitigate noise, buffer zones, acoustic barriers and altitude descent paths provide an efficient solution. While metrics vary across studies, a buffer zone of approximately 5 metres is sufficient to reduce noise, providing vertical shadowing. Computational fluid dynamics simulations from Dubai’s vertiport facility indicate that zones with decks slanted on a 5-7 degree angle can deflect up to 60% of eVTOL noise upward, minimising its effect during takeoffs and landings (Yunus et al., 2023).
Regarding weather-related precautions, different measures need to be addressed, varying according to local climate. Anti-slip coatings prevent accidents in cold and icy weather, while angled surfaces allow for efficient drainage of water. Additionally, vertiport pads and infrastructure should be designed to withstand various precautions, including battery fires, sparks, lightning strikes, power surges and microbursts. Implementing these measures ensures local security while maintaining a vertiport’s infrastructural security.
Tra10.6. Regional Differences
In this section, the infrastructure of Kenya and Belgium will be examined to help show the design needs of the aerial taxis.
The Integrated National Energy Plan (INEP) of the Energy and Petroleum Regulatory Authority (EPRA) states that bringing together the grid, mini-grids and renewable systems is key to expanding reliable energy access in Kenya. However, the electricity supply in the country is still unstable, making investments in strong grid systems and dependable backups an important part of infrastructure planning.
In Belgium, Elia Transmission (2024) reports that renewables made up 29.8% of the electricity mix in 2024, while progress also underlines the importance of connecting new charging systems to a cleaner grid. However, Elia Transmission’s Adequacy and Flexibility Study for 2026–2036 (2025) warns of possible capacity shortages as early as 2028. To avoid this, there needs to be more demand-side flexibility, better energy storage and grid upgrades to keep the system reliable.
10.7. Regulatory Implementation on Infrastructure
10.7.1. Urban Sustainability
One of the primary attractions to the movement towards eVTOL integration is the growing unsustainability of the current urban environment. The ability of eVTOLs to avoid traffic congestion and traditional road routes, which are often convoluted and not optimal for the quickest time to destination, means they represent an improvement over current transportation methods. 60% of the travel distances can be saved by using direct flight paths (Takacs & Haidegger, 2022).
10.7.2. Storage Regulations
One of the necessary infrastructure considerations needed to ensure that integration is attainable includes the ability to ensure safe storage of eVTOLs, known as vertiports, which is currently being worked on by regulators such as the UKCAA, EASA and FAA, typically deriving rules from regulations already in place for other transport methods.
10.7.3. Building Regulations
It is important to consider the role of buildings in the implementation of eVTOLs, as they will need sufficient helipad or similar landing bays to accommodate landings and takeoffs. The regulation surrounding this will likely be tied to the current helicopter regulation. Regulations like the UK’s CAP 437 or the FAA’s Advisory Circular 150/5390-2 provide detailed guidelines, and requirements can vary based on jurisdiction and the specific use of the helipad.
10.7.4. Urban Area Integration
Urban areas may need a critical number of eVTOLs to be airborne in each area. Breaking down urban areas into quadrants and detailing minimum altitudes depending on terrain will likely form a key part of regulation. A NASA study suggests implementation of flight corridors over low-risk areas constrained by coordinates (McRoberts et al., 2014).
11. Conclusion
11.1 Project Review
While this research project provides a comprehensive exploration of eVTOL design, infrastructure and operational requirements, several limitations should be acknowledged to put our findings into context. First, the timeframe was a significant constraint. With only four weeks to research, write and compile our work, the scope of analysis had to remain relatively narrow. Second, our research was limited due to our lack of resources. Many aerospace design standards, certification guidelines, global anthropometric data and detailed technical data are either restricted, proprietary or behind paywalls. Therefore, our analysis sometimes relied on publicly available information rather than primary technical documentation.
Despite these constraints, the project successfully brought together diverse perspectives, ranging from aerodynamics and infrastructure planning to human-centred engineering and legal considerations, into a unified document. By identifying both the potential of eVTOL systems and the challenges that remain, this research project provides a foundation for further research.
11.2 Optimised design
| HTA Reference | Report Reference |
| 1.1. Order an eVTOL | 8.1.5. Human Centred Engineering; 8.1.5.1. ISO 9241-210; 10.1.1. Passenger Safety and Information |
| 1.1.1. Assess user health / cancel if needed | 9.1. Human Factors and Training; 9.3. Flight Safety and Emergency Procedures |
| 1.1.2.-1.1.4. Retrieve device → open app | 9.5. Secure Communication; 10.1.4. Cybersecurity and Reliability |
| 1.1.5. Input user info | 8.1.5. Human Centred Engineering; 8.1.5.2. Anthropometrics |
| 1.1.6.1.-1.1.6.2. Party size and level of rush | 8.3.1. Range and Payload; 10.1.2. Vertiport and Flight Coordination |
| 1.1.6.3. Confirm possessions / weight | 8.3.1. Range and Payload; 8.1.5.2. Anthropometrics |
| 1.1.6.4.-1.1.6.5. Budget and desired ride | 8.1.4. Noise Reduction; 10.1.2. Vertiport and Flight Coordination |
| 1.2.1. Go to the chosen pick-up address | 10.5.1. Restricted Access and Buffer Zones; 10.3.1. Materials and Systems |
| 1.2.2. Locate eVTOL | 9.5. Secure Communication; 10.1.4. Cybersecurity and Reliability |
| 1.2.3. / 2.1. Board eVTOL | 10.3.1. Materials and Systems; 8.1.5.2. Anthropometrics |
| 2.2.1. Listen to safety instructions | 9.3. Flight Safety and Emergency Procedures; 10.4. Safety and Emergency System |
| 2.2.2.-2.2.5. Device / network mode | 9.5. Secure Communication; 10.1.4. Cybersecurity and Reliability |
| 2.2.6. Stow and secure loose items | 9.3. Flight Safety and Emergency Procedures; 10.4. Safety and Emergency System |
| 2.3. Confirm flight readiness | 9.3. Flight Safety and Emergency Procedures; 9.6.3. Application of Sensor Fusion in eVTOL DAS |
| 3.1. Approach destination | 8.1.4. Noise Reduction; 10.4. Safety and Emergency System; 10.5.2. Extreme Weather and Sound Pollution Measures |
| 3.2. After touchdown | 10.3.1. Materials and Systems; 10.5.1. Restricted Access and Buffer Zones |
| 3.3. Terminate journey in app | 10.4. Safety and Emergency System; 10.3.1. Materials and Systems; 10.1.4. Cybersecurity and Reliability |
11.3. Future Work
Future work should quantify human-centred benefits (e.g., error rates and task time) under realistic operations and validate corridor/vertiport rules with field data. Priority areas include resilient communications, weather-robust scheduling and standardised training/briefings tied to measurable safety outcomes.
12. Bibliography
Brunelli, M., Ditta, C.C. & Postorino, M.N. (2023) New Infrastructures for Urban Air Mobility Systems: A Systematic Review on Vertiport Location and Capacity, Journal of Air Transport Management, 112(102460).
de Andrade, A.I., Vieira, D., Marques, J.L.R. & de A.L. Babadopulos, M.A.F. (2022). Operational Feasibility to Introduce the eVTOL in São Paulo City Using the Existing Infrastructure of Helipads and Heliports, Embry-Riddle Aeronautical University [PDF]. <https://repositorio.itl.org.br/jspui/bitstream/123456789/612/1/Operational%20feasibility%20to%20introduce%20the%20EVTOL%20in%20S%C3%A3o%20Paulo%20city%20using%20the%20existing%20infrastructure%20of%20helipads%20and%20heliports.pdf>
Doo, J. (2023). The Use of eVTOL Aircraft for First Responder, Police, and Medical Transport Applications, SAE International Research Report, EPR2023020. <https://doi.org/10.4271/EPR2023020>
Elia Transmission Belgium (2025). Electricity mix for Belgium in 2024: record international exchanges, significant increase in solar generation, and low use of gas-fired capacities, Elia Group [online]. <https://www.elia.be/press/2025/01/20250102_electricity-mix>
Elia Transmission Belgium (2025). Key priorities from Belgium’s Adequacy and Flexibility Study 2026-2036: continued implementation of the CRM, accelerated development of flexibility and clarity on the long-term energy mix, Elia Group [online]. <https://www.elia.be/en/press/2025/06/20250627-key-priorities-from-belgium-adequacy-and-flexibility-study-2026-2036>
Energy & Petroleum Regulatory Authority (2024). Energy & Petroleum Statistics Report 2023/2024, EPRA [online]. <https://www.epra.go.ke/energy-petroleum-statistics-report-20232024>
Energy & Petroleum Regulatory Authority (n.d.). Environmental Health & Safety, EPRA [online]. <https://epra.go.ke/environmental-health-safety>
Energy & Petroleum Regulatory Authority (n.d.). The Integrated National Energy Plan (INEP), EPRA [online]. <https://www.epra.go.ke/integrated-national-energy-plan-inep>
Fadhil, D.N., Moeckel, R. & Rothfeld, R. (2019). GIS-based Infrastructure Requirement Analysis for an Electric Vertical Take-off and Landing Vehicle-based Transportation System, Transportation Research Procedia, 41, pp. 101-103.
Farooq, U., Iftikhar, A., Shafique, M.F., et al. (2021). C-Band and X-Band Switchable Frequency-Selective Surface, Electronics, 10(4), 476.
Fioriti, M., Borghi, M. & Pavan, G. (2024). Environmental and Economic Assessment of an eVTOL Aircraft Fleet for Urban Air Mobility, International Council of the Aeronautical Sciences [PDF]. <https://www.icas.org/icas_archive/icas2024/data/papers/icas2024_0500_paper.pdf>
Flores, A., Ziakkas, D. & Delisle, J.F. (2023). The Role of Human-Centered Design in Advanced Air Mobility Implementation Process, In Ahram, T. & Karwowski, W. (eds) Application of Emerging Technologies, (AHFE International Conference), 115.
Franciscone, B.G. & Fernandes, E. (2023). Challenges to the Operational Safety and Security of eVTOL Aircraft in Metropolitan Regions: A Literature Review, Journal of Airline Operations and Aviation Management, 2(1), pp. 45–56.
Fryar, C.D., Gu, Q. & Ogden, C.L. (2012). Anthropometric Reference Data for Children and Adults: United States, 2007–2010, Vital and Health Statistics, 11(252), pp. 1-48.
Fuglerud, K.S. (2014). Inclusive Design of ICT: The Challenge of Diversity, University of Oslo [PhD Thesis]. <https://www.researchgate.net/publication/270508482_Inclusive_design_of_ICT_The_challenge_of_diversity>
Goyal, R. & Cohen, A. (2022). Advanced Air Mobility: Opportunities and Challenges Deploying eVTOLs for Air Ambulance Service, Applied Sciences, 12(3), 1183.
Hill, B.P., DeCarme, D., Metcalfe, M., et al. (2020). UAM Vision Concept of Operations (ConOps) UAM Maturity Level (UML) 4, NASA Technical Reports Server [PDF]. <https://ntrs.nasa.gov/api/citations/20205011091/downloads/UAM%20Vision%20Concept%20of%20Operations%20UML-4%20v1.0.pdf>
International Organization for Standardization (2019). ISO 9241-210:2019: Ergonomics of Human-System Interaction Part 210 – Human-Centred Design for Interactive Systems, ISO.
International Trade Administration (2024). Kenya Country Commercial Guide, ITA [online]. <https://www.trade.gov/country-commercial-guides/kenya-infrastructure>
Jeong, J., So, M. & Hwang, H.Y. (2021) Selection of Vertiports Using K-Means Algorithm and Noise Analyses for Urban Air Mobility (UAM) in the Seoul Metropolitan Area, Applied Sciences, 11(12), 5729.
Kleinbekman, I.C., Mitici, M. & Wei, P. (2019). Rolling-Horizon Electric Vertical Takeoff and Landing Arrival Scheduling for On-Demand Urban Air Mobility, Aerospace Research Central [online]. <https://arc.aiaa.org/doi/10.2514/1.I010776>
Kutila, M., Pyykonen, P., Ritter, W., et al. (2016). Automotive LIDAR Sensor Development Scenarios for Harsh Weather Conditions, 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), pp.265-270.
Labib, N.S., Brust, M.R., Danoy, G., et al. (2021). The Rise of Drones in Internet of Things: A Survey on the Evolution, Prospects and Challenges of Unmanned Aerial Vehicles, IEEE Access, 9, pp. 115466–115487.
Li, J., Zhan, W., Chakraborty, T.C., et al. (2023). Satellite-Based Ranking of the World’s Hottest and Coldest Cities Reveals Inequitable Distribution of Temperature Extremes, Bulletin of the American Meteorological Society, 104(7), e1268–e1281.
Liu, Z., Barlow, J.F., Chan, P.-W., et al. (2019). A Review of Progress and Applications of Pulsed Doppler Wind LiDARs, Remote Sensing, 11(21), 2522.
Mailutha, J.T., Simatei, J.K. & Nguru, K.R. (2007). Anthropometric Data for Kenya’s Working Population Group, CABI Databases.
McRoberts, R., Early, J.M., Price, M.A., et al. (2014). Improving Feasability of Point to Point Operations Through Civil Aerial Refuelling, 14th AIAA Aviation Technology, Integration, and Operations Conference, AIAA 2014-3272.
Mendonca, N., Murphy, R.J., Patterson, M.D., et al. (2022). Advanced Air Mobility Vertiport Considerations: A List and Overview, NASA Technical Management, 20220007100.
Motmans, R. (2005). Body dimensions of the Belgian population, DINBelg [online]. <https://www.dinbelg.be/adultstotal.htm>
Muñoz, C., Narkawicz, A., & Chamberlain, J. (2014). A TCAS-II Resolution Advisory Detection Algorithm, NASA Langley Research Center.
O’Reilly, P.E., Rahimi, R.A., Marques, J.L.R. & de A.L. Babadopulos, M.A.F. (2024). Vertiport Ventures: Assessing Operational Feasibility for eVTOL Integration in São Paulo’s Helipad and Heliport Infrastructure, Journal of Marketing Analytics.
Ratei, P., Naeem, N. Prakasha, P.S. & Nagel, B. (2024). Sensitivity Analysis of Urban Air Mobility Aircraft Design and Operations Including Battery Charging and Swapping, CEAS Aeronautical Journal, 15, pp. 1–15.
Saxena, R.R., Prabhakar, T.V., Kuri, J. & Yadav, M. (2023). Vertiport Terminal Scheduling and Throughput Analysis for Multiple Surface Directions, arXiv, arXiv:2408.01152.
Schweiger, K. & Preis, L. (2022). Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations, Drones, 6(7), 179.
Schweiger, K., Schmitz, R. & Knabe, F. (2023). Impact of Wind on eVTOL Operations and Implications for Vertiport Airside Traffic Flows: A Case Study of Hamburg and Munich, Drones, 7(7), 464.
Shi, M., Huang, X. & Choi, Y. (2024). Mechanical Analysis of Adding External Elevators by Different Placement to Existing Buildings, Academic Journal of Science and Technology, 10(2), pp. 45–58.
Takacs, A. & Haidegger, T. (2022). Infrastructural Requirements and Regulatory Challenges of a Sustainable Urban Air Mobility Ecosystem, Buildings, 12(6), 747.
Tang, A.C.B. (2020). A Review on Cybersecurity Vulnerabilities for Urban Air Mobility, AIAA SciTech Forum, Paper No. 0773.
UK Civil Aviation Authority (2025). New Safety Insights to Guide Future eVTOL Regulation Published, UKCAA [online]. <https://www.caa.co.uk/newsroom/news/new-safety-insights-to-guide-future-evtol-regulation-published/>
Wang, M., Xiaoyang, G., He, R., Zhang, S. & Ma, J. (2023). Bi-layer Sizing and Design Optimization Method of Propulsion System for Electric Vertical Takeoff and Landing Aircraft, Energy, 283(129052).
Wei, Q., Nilsson, G. & Coogan, S. (2021). Capacity-Constrained Urban Air Mobility Scheduling, arXiv, arXiv:2107.02900.
Xiang, S., Xie, A., Ye, M., et al. (2024). Autonomous eVTOL: A Summary of Researches and Challenges, Green Energy and Intelligent Transportation, 3(1), 100140.
Yeong, D.J., Velasco-Hernandez, G., Barry, J. & Walsh, J. (2021). Sensor and Sensor Fusion Technology in Autonomous Vehicles: A Review, Sensors, 21(6), 2140.
Yunus, F., Casalino, D., Avallone, F. & Ragni, D. (2023). Efficient Prediction of Urban Air Mobility Noise in a Vertiport Environment, Aerospace Science and Technology, 139, 108410.
Zaid, A.A., Belmekki, B.E.Y. & Alouini, M.S. (2023). eVTOL Communications and Networking in UAM: Requirements, Key Enablers, and Challenges, IEEE Communications Magazine, 61(8), pp. 154–60.


{kind=link}