Saksham Dhingra (SD)[1], Alexandra Melnikova (AM)[2], Julián Méndez (JM)[3], Aayan Naeem (AN)[4], Elif Oktay (EO)[5], Vibhav Pandrangi (VP)[6], Adam Ramzy (AR)[7]
[1] Excelsior American School
[2] Latymer Upper School
[3] Colegio Calasanz Bogotá
[4] International School of Creative Science
[5] Robert College
[6] Mountain Ridge High School
[7] Georgetown Day School
Supervised by Liam Obuobie
Edited by Elif Oktay
Co-edited by Aayan Naeem
Abstract (EO)
The E-Block is a shared micromobility vehicle designed to address the shortcomings of existing micromobility devices. The main shortcomings this study identifies are under the categories of user-centeredness, accessibility, inclusivity, and safety. The E-Block incorporates human-centered design principles, autonomous driving capabilities, and inclusive app interference through review of scholarly articles and existing micromobility systems. A key innovation of this study, under the category of safety, is the helmet dock system. This system enforces safety compliance by preventing the E-Block to operate without the user wearing the provided helmet. Additionally, the E-Block integrates real-time monitoring through sensors and cameras, and operates at Level 4 autonomy within geofenced zones. Future considerations for the E-Block include AI-based crash prediction and solar charging. These considerations aim to further enhance the E-Block’s usability and sustainability. This study validates the E-Block’s design through hierarchical task analysis (HTA), legal requirements, anthropometric data and operational standards. Ultimately, the E-Block aims to provide a safer, more inclusive, and affordable alternative to existing shared micromobility vehicles.
Keywords: Micromobility, Shared Micromobility, Minimalistic, E-Block, Human-Centered Design, User Requirements, Autonomous, Accessibility, Inclusivity, Hierarchical Task Analysis, HTA, Safety
1. Introduction (AM, JM)
In recent years, cities around the world have been forced to confront pressing challenges related to traffic congestion and pollution. In response, micromobility – lightweight, typically electric-powered vehicles designed for short travels – has emerged as a solution to the urban mobility problems. These vehicles, including e-scooters and e-bikes, are typically used for trips under 10 kilometers and are designed to be efficient, accessible, and environmentally sustainable. The point of micromobility lies in its ability to reduce dependence on cars, and reduce CO₂ emissions. Big cities like London, Amsterdam, New York, and San Francisco have invested heavily in micromobility, including bike lanes, smart parking, and public sharing systems. These efforts support environmental goals, and also contribute to more inclusive and flexible types of transport.
Therefore, the E-Block project was developed as a response to the evolving demands of urban transportation. The E-Block, having a Human-Centered Design, is a compact, electric and autonomous micromobility device. Its minimalistic, block-shaped structure allows for greater stability, accessibility, security and storage space. As a result, the E-Block is accessible to people of all ages with different needs.
2. Aim and Objectives (AR)
Aim:
This study aimed to research and assimilate newer and better ways to transport individuals via a micromobility vehicle. We achieved this by focusing primarily on accessibility and creating a streamlined user interface to maximize and meet the expectations of potential users.
Objectives:
- Create a hierarchical task analysis (HTA).
- Integrate autonomous navigation and driving abilities.
- Develop both a user friendly and intuitive E-Block user interface.
- Maximize accessibility for all users.
3. Literature review (EO)
3.1. User Centered Design
User centered design is essential in developing shared micromobility systems that meet the needs of diverse urban populations. Jaber et al. (2023) found that factors such as parking type, cost, and travel time were the main determinants that influenced user preferences. Their study determined that when the travel time or travel cost increased by 20%, users tended to switch to shared e-micromobility options. When choosing which type of e-micromobility to switch to for their journey, users mainly considered the parking type. Options that implemented the “free-floating” (dockless) parking type were significantly preferred over the “parking lot” (dock-based) systems.
Similarly, Rollandi et al. (2025) aimed to gain an understanding about urban micromobility and inclusivity by evaluating a novel self-balancing micromobility device through real-world testing. In addition to Jaber et al.’s findings, they emphasized the importance of comfort, intuitive controls, and adaptability to urban infrastructure. Their study especially highlighted the importance of careful consideration of spatial, functional, and regulatory aspects when integrating a new micromobility solution within an existing mobility network.
The common findings of both studies were related to demographic trends. Younger users, compared to older users, were more open to engage with new micromobility solutions. Older users required inclusive and targeted design strategies to increase their engagement and satisfaction with new micromobility solutions (such as the one in Rollandi et al.’s research). These combined findings highlight the importance of user centered design aspects when designing a new micromobility device.
3.2. Accessibility and Inclusivity
Similar to user centered design, accessibility and inclusivity are critical considerations in designing shared micromobility systems that serve diverse populations. In a large-scale European study, Goralzik et al. (2022) surveyed 553 disabled individuals across 21 countries to assess projected accessibility and use intention for various shared mobility options. Findings revealed that e‑scooter and bike sharing were perceived as the least accessible and least attractive, especially by people with physical, visual, or multiple disabilities. The research emphasized that no existing shared services adequately address the access needs of disabled individuals in their current form.
The participants of this study offered key suggestions for increasing the accessibility of micromobility services: an on demand door-to-door service, an accessible booking app, real-time travel information, and the necessity of accommodating wheelchairs. These suggestions highlight the importance of including persons with disabilities in planning and creating truly inclusive mobility services.
3.3. Operational Efficiency and Infrastructure
Operational efficiency in shared micromobility is closely linked to user perceptions of vehicle availability, accessibility, and ease of use. According to the findings of Madapur et al. (2020), expectedly, weak or poorly planned micromobility infrastructure leads to low usage. This is largely due to the fact that rapidly growing cities often marginalize pedestrian and cycling access. The study highlights that uncoordinated infrastructure, intrusive parking, and confusing access points hinder system performance and reduce safety.
To address these challenges, the researchers of this study propose the integration of Non-Motorized Transport (NMT) nodes. These nodes would ultimately act as scalable hubs for shared micromobility services. Madapur et al. argue that these NMT nodes would ultimately offer better access to transit systems and reduce sidewalk clutter. While true, this solution doesn’t align with Jaber et al.’s finding about user centered design. According to Jaber et al., micromobility services that implemented such nodes would make themselves less preferable.
4. Methodology (AR)
To thoroughly study micromobility transport methods, we researched both academic papers and real-world micromobility vehicles, such as scooters and bicycles. This allowed us to build a wide base of knowledge on all aspects of micromobility and how they are designed to be user-centered. Using this information, we sourced the best parts from each method and created a whole new, highly accessible, efficient, and convenient form of Micromobility called the E-Block. We organized how the user would interact with the E-Block using a hierarchical task analysis (HTA). In our HTA, we made it a point to highlight just how usable the E-Block is, changing micromobility forever. Furthermore, by utilizing alternative research papers and studies, we addressed the gaps that required refinement, thereby making the E-Block the ultimate micromobility transportation solution.
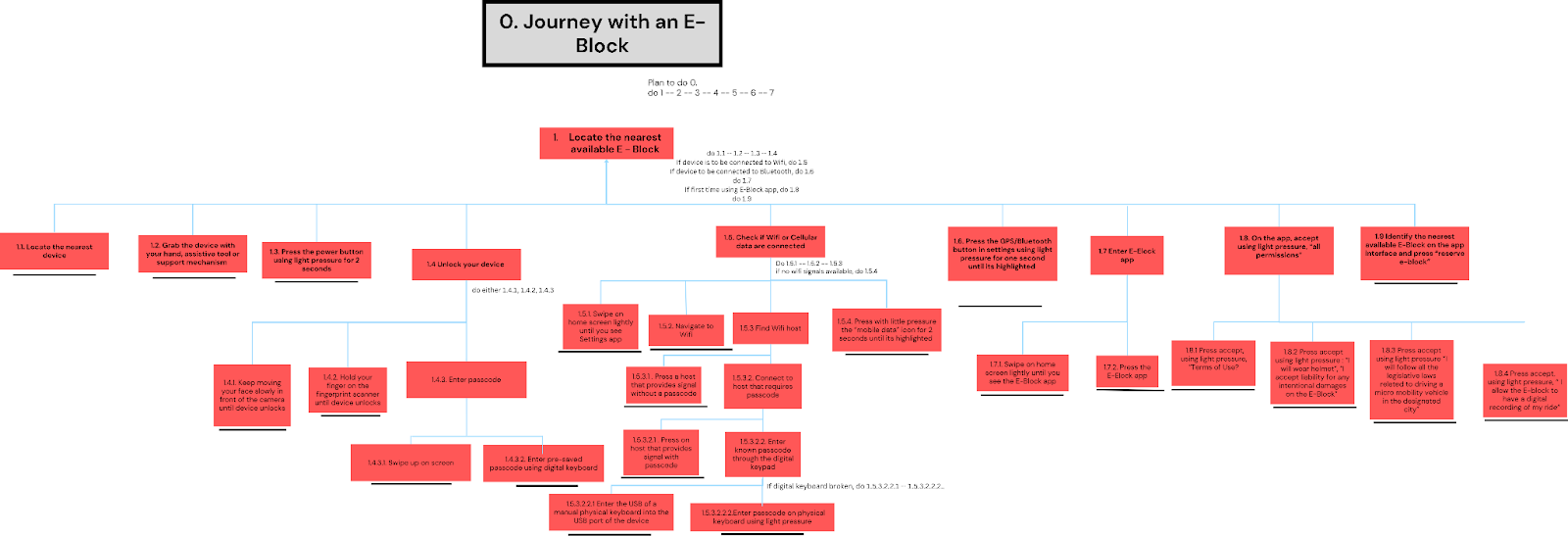
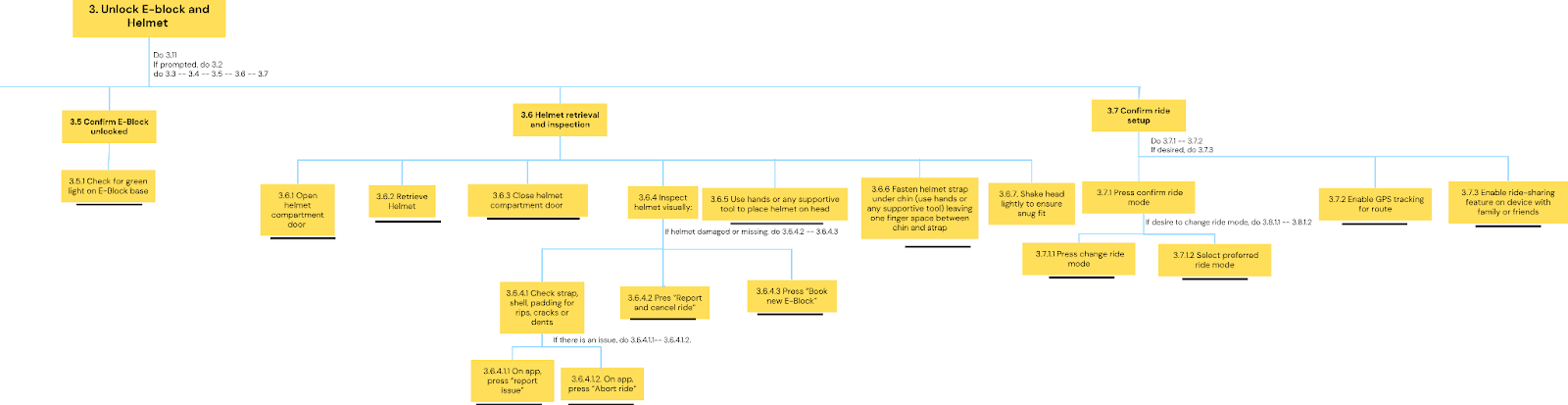
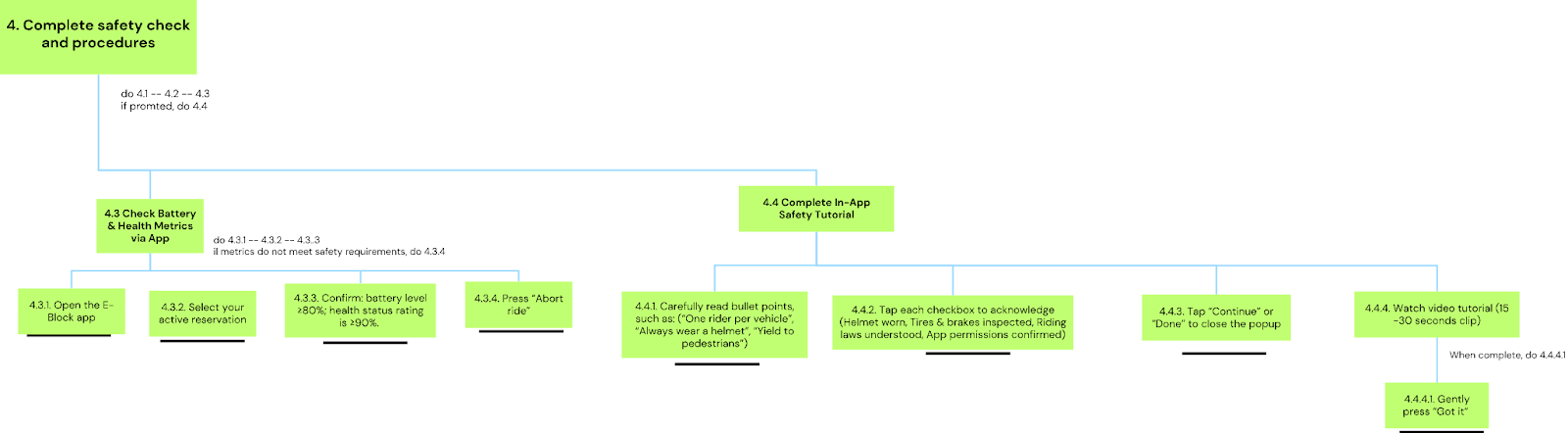
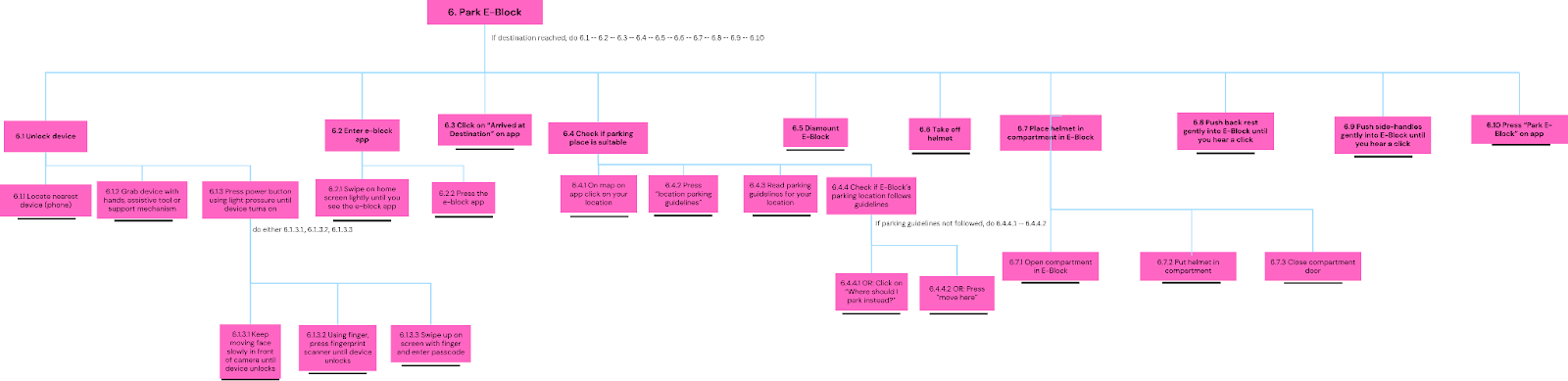
4.1. Hierarchical Task Analysis (HTA) (SD; edited by AM, JM, AN, EO, VP; created by AR)
Hierarchical task analysis is a method of breaking down a large task into smaller subtasks.
(AN)

(JM)

(SD)

(VP)

(EO)
(AM)

(AR)
5. Concept Design (AM)
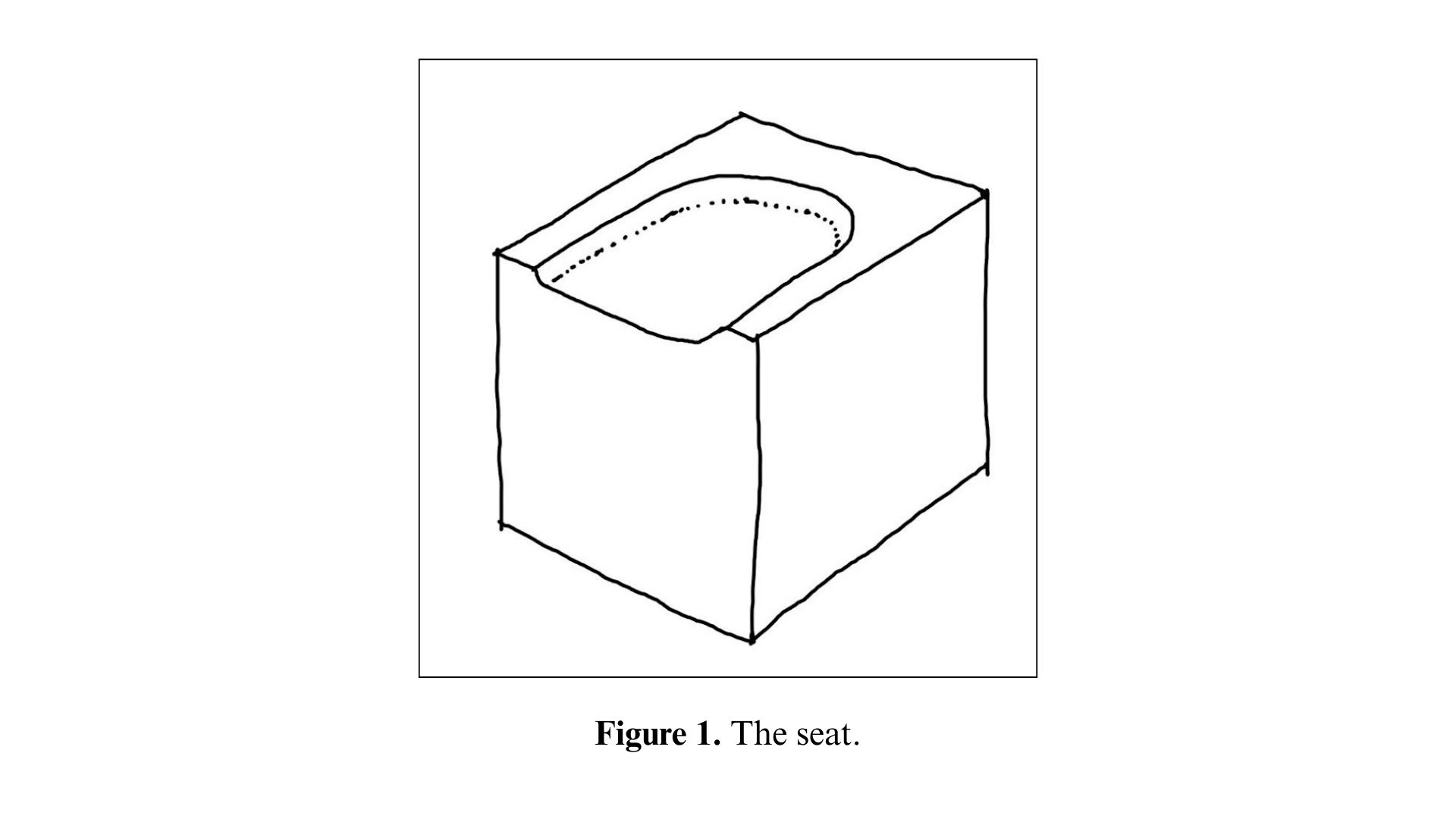
The concept of the E-Block originated from a seat in the form of a block seen in London. What appealed to us about this seat was the minimalistic and compact design, as well as the potential for lots of space inside the block for a battery, wheels, and a helmet.
Figure 1 shows the seat.
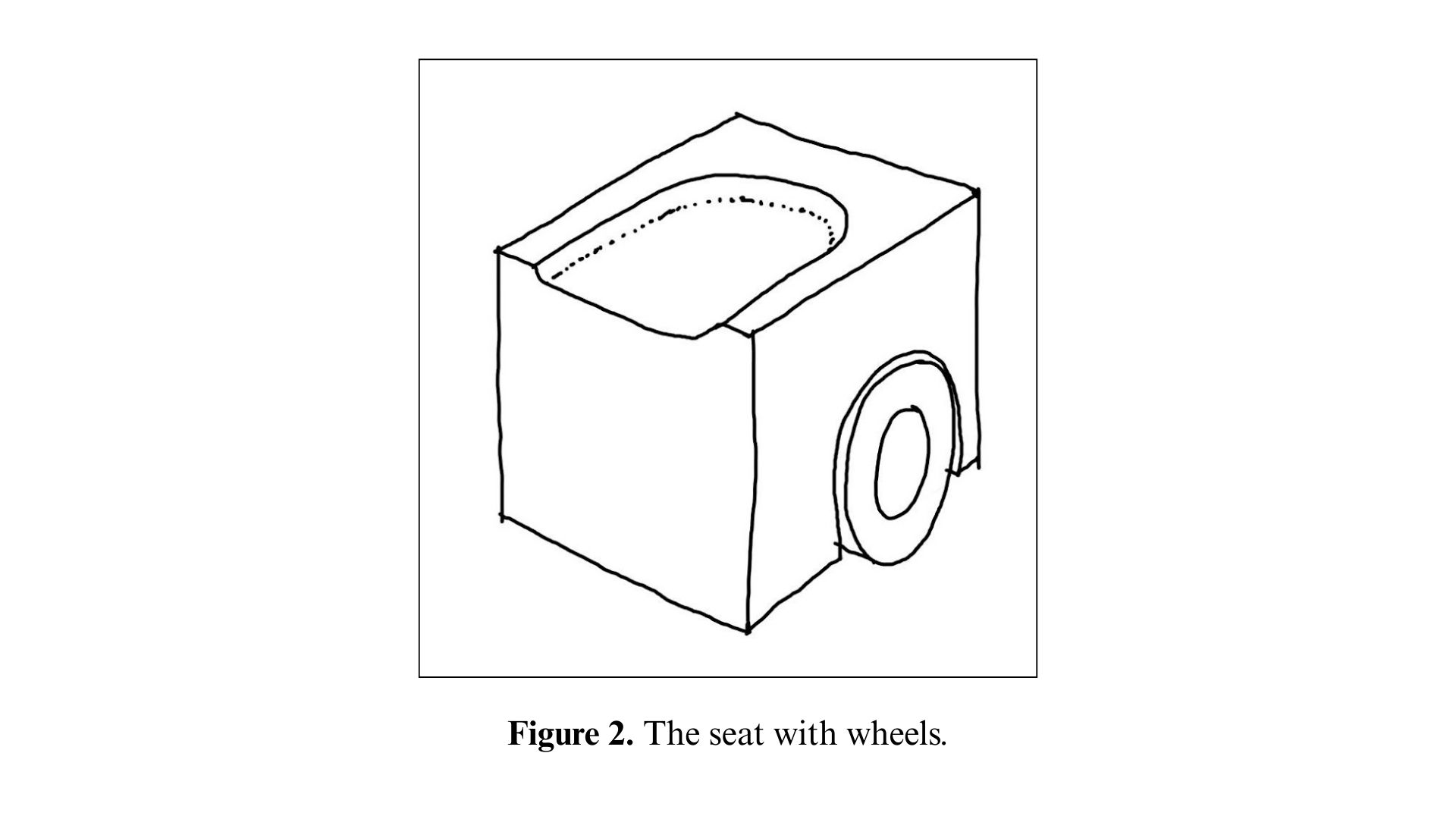
The first step in making the seat mobile was to add wheels. This is shown in Figure 2.
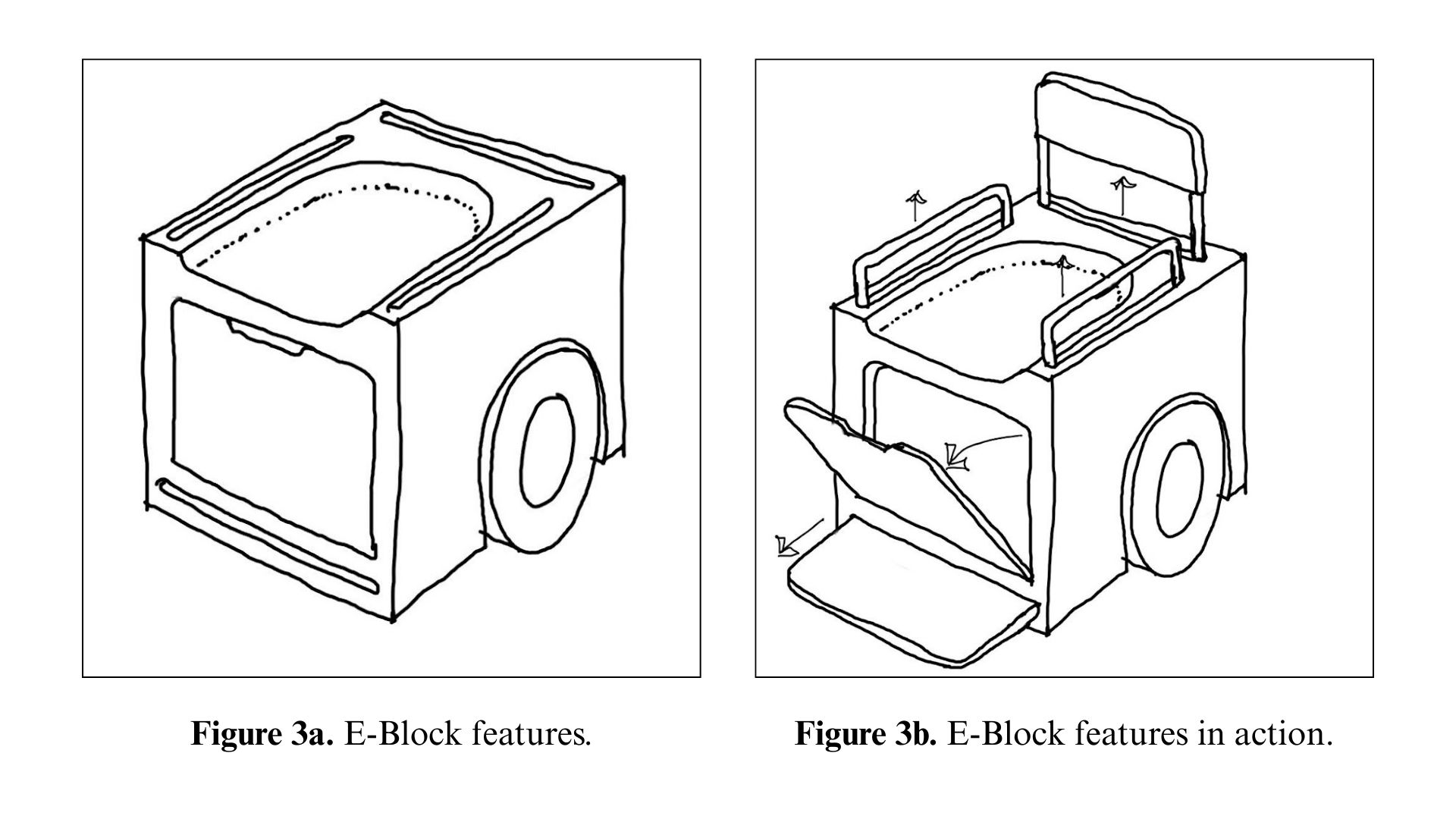
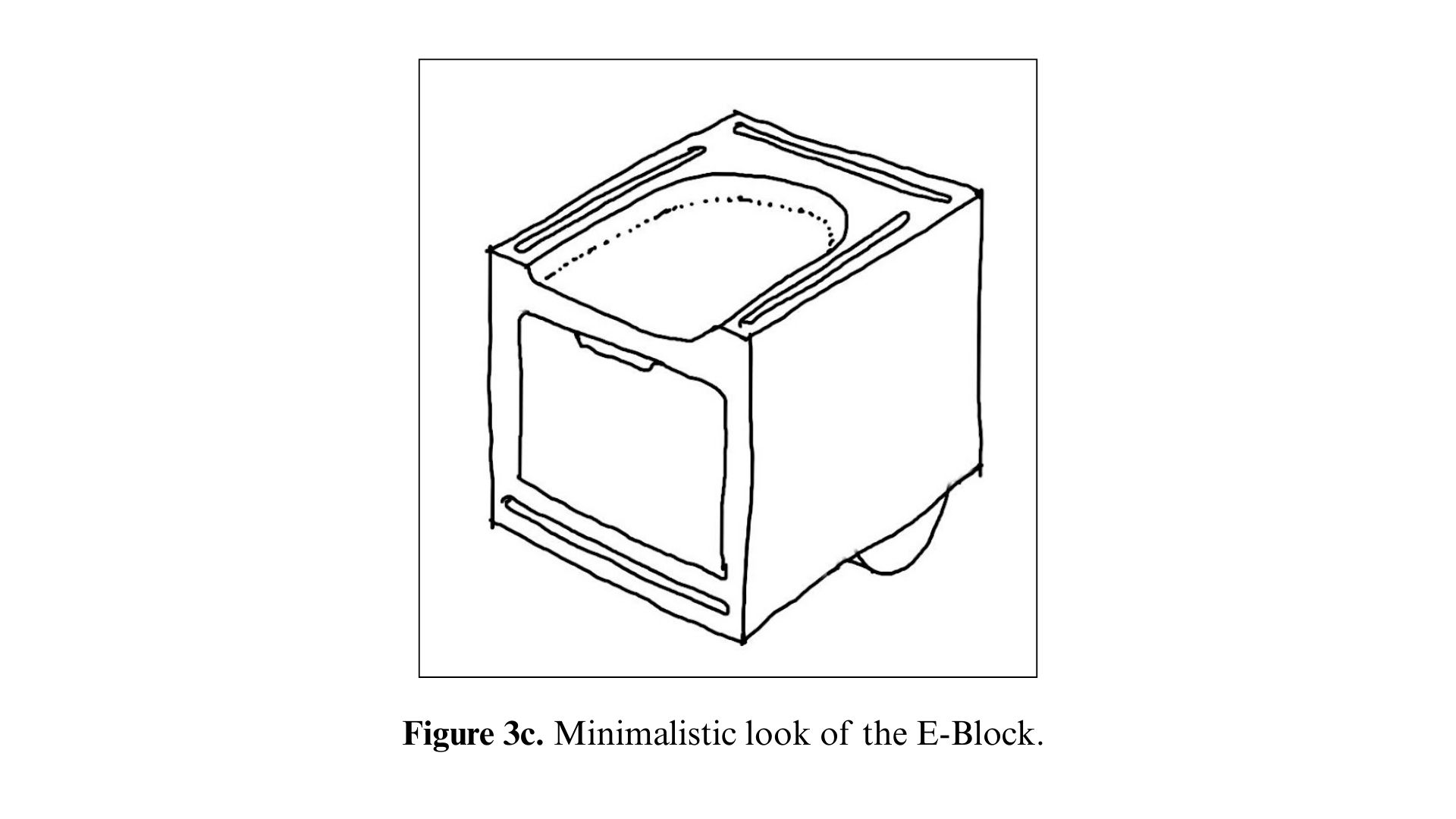
As we began thinking about safety and comfort, we added a backrest, handles, a footrest, and a compartment for a helmet. Figure 3a shows these features, and Figure 3b shows them in action. The backrest, footrest, and handles are all designed to be pushed back into the block when not in use to create a more minimalistic look for the E-Block. Another potential design is with the wheels hidden, as shown in Figure 3c.
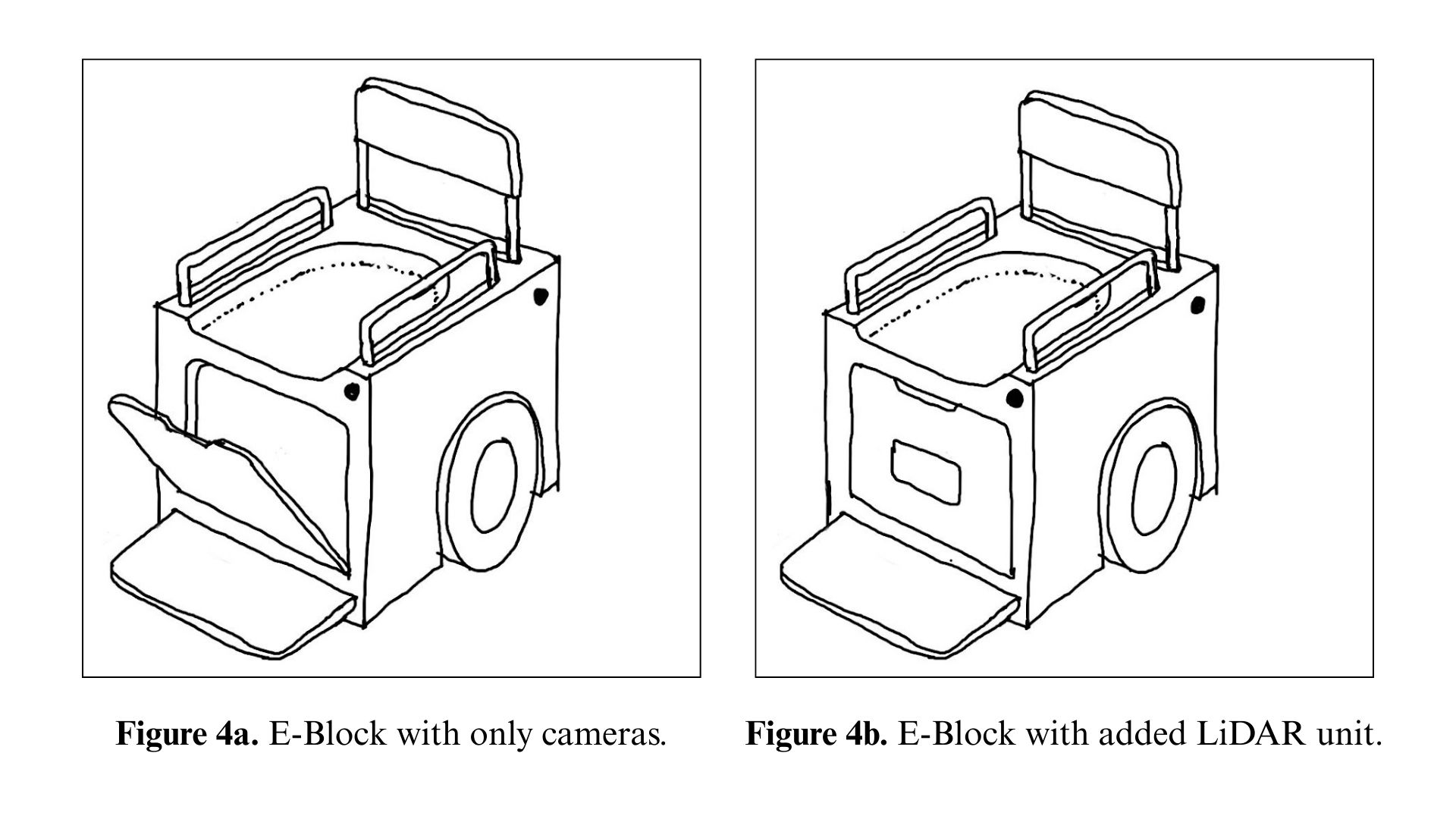
To enable autonomous motion, we added cameras and sensors. As discussed later in the report, we looked at two approaches: one using only cameras and another combining cameras with a LiDAR unit. Figure 4a shows the E-Block equipped with only cameras. Figure 4b shows the E-Block with an added LiDAR unit mounted on the front.
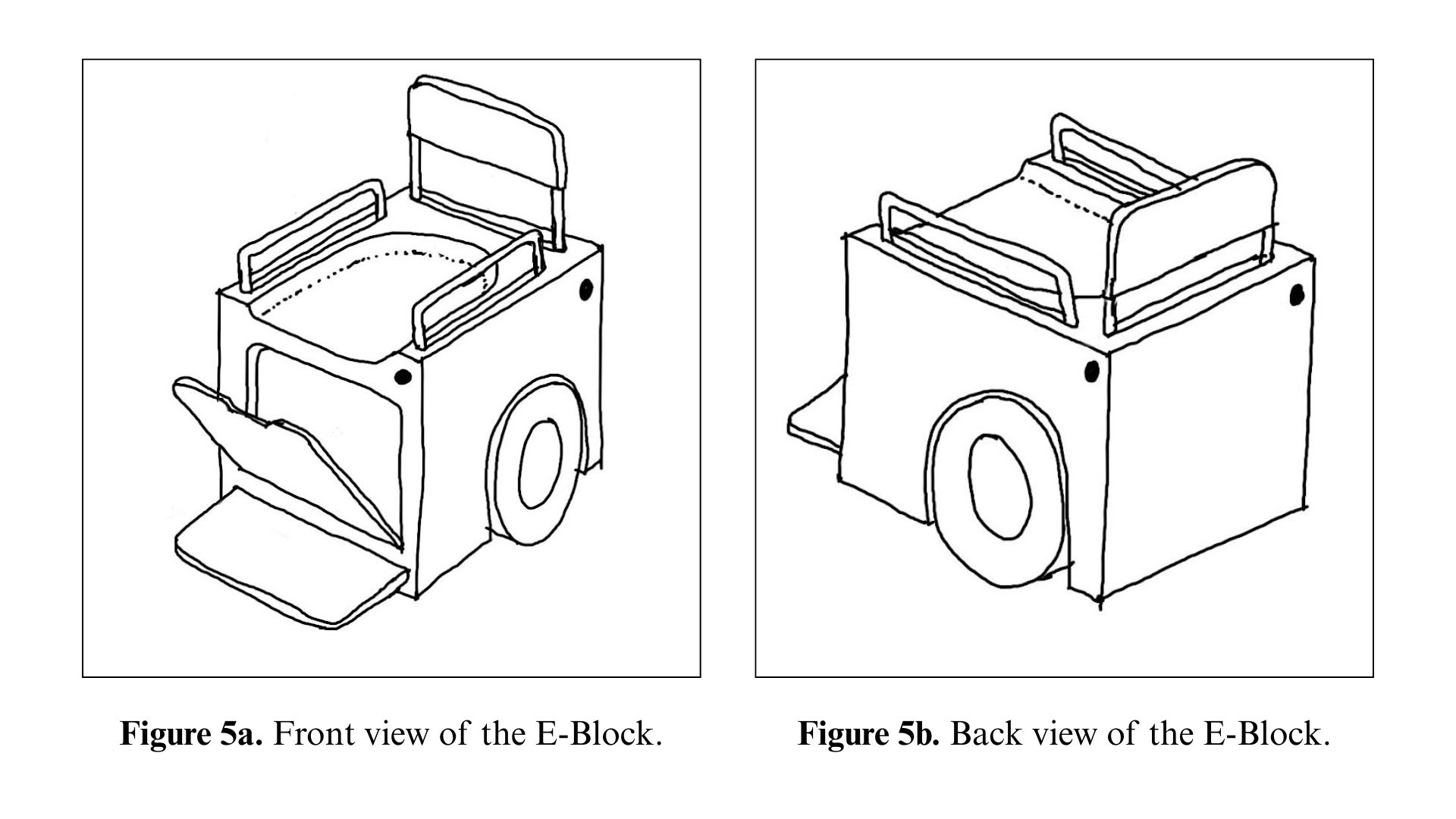
Finally, Figures 5a and 5b show the front and back view of the E-Block respectively.
6. Human-Centered Design Considerations
6.1. User Requirements
6.1.1. Safety Systems
6.1.1.1. THE CASE FOR MANDATORY HELMET USE (AN)
A study conducted highlights the urgent need for helmet enforcement in shared micromobility. Over the three month research period in 2018, researchers recorded 190 scooter-related injuries requiring hospitalization, half of which were to the head. Notably, 15% of those injuries involved a traumatic brain injury, and only one of the injured riders was wearing a helmet when the injury occurred (Hayden et al., 2019). These statistics highlight the critical role of helmet use and lay groundwork for our decision to implement a “helmet dock system” that lets the E-Block operate only if the user wears their helmet. Consequently, the E-Block poses much less of a threat than a traditional micromobility vehicle such as a scooter.
The legal requirements for helmets are as follows:
- UK: Helmets are not legally required for electric micromobility vehicles or e-bikes but are strongly recommended.
- US: Laws vary by state. For example, in California, helmets are mandatory for riders under 18 using electric micromobility products.
- Europe: Generally, helmets are not required for low-speed micromobility vehicles, but some countries (e.g., Spain, Sweden) mandate helmets for minors.
6.1.1.2. HELMET DOCK SYSTEM AND RIDE AUTHORIZATION (SD, CONTRIBUTION BY EO)
The “helmet dock system” is a novel, non-negotiable form of safety when using the E-Block (See Step 3.6.). This IoT-enabled helmet dock system physically secures the helmet and turns off the motor until the rider is authenticated (Shenzhen Omni Intelligent Technology, 2023). The helmet is secured inside its dock using an electronic solenoid lock that disengages only when the server verifies the E-Block user’s app session and returns an “unlock enabled” signal (What Are Solenoid, 2022). When unlocked, the app displays a “Helmet Unlocked” message, and the E-Block provides physical indications such as light, noise, or vibrations to confirm readiness for ride
We encourage the rider to inspect the helmet’s shell, padding, and straps for damage, with an option to report and cancel the ride if necessary. After placing and fastening the helmet securely, the app displays battery status, ride instructions, and a “Start Ride” message, confirming that all safety conditions are met (See Step 3.8.5).
The E-Block, due to it only operating if the user wears a helmet, poses much less of a threat for the well-being of the user than a traditional micromobility vehicle.
6.1.1.3. SYSTEM REDUNDANCY AND REGULATORY SAFETY COMPLIANCE (AM)
To enhance the safety of the user, fail-safe systems – including backup braking, steering and power systems – will be integrated in the event of system failure. Additionally, the E-Block must adhere to relevant federal and state regulations governing autonomous micromobility, including compliance with safety, operational, and data-handling standards.
6.1.1.4. THEFT PREVENTION (AN)
Micromobility vehicles have a large demand; therefore, they can easily be stolen and resold online. According to a Sustainability Report, the losses due to theft or vandalism are approximately 20% in e-scooters and e-bikes (Calan et al., 2024).
The E‑Block implements the following features to deter theft:
- The E‑Block will only operate if the user has been verified by biometric or passcode verification through the E-Block app.
- If the E-Block is moved while locked, the onboard Global Positioning System (GPS) sensor triggers. The motor and the battery output will autonomously shut down. Additionally, local enforcement will be notified via the E-Block app if the E-Block is displaced beyond a certain measure.
6.1.2. Human-Centered E-Block App Design (SD)
The E-Block app is designed with a human-centered focus, with emphasis on minimizing uncertainty and maximizing rider security from the moment the user signs up (See Step 3.1). Due to its human-centered focus, the app prioritizes visual clarity, consistent navigation, and error prevention.
For first-time users, onboarding begins with a short interactive tutorial. This tutorial introduces users to the key operational steps of the E-Block, including unlocking the vehicle, proper helmet usage, the consent flow, and hygiene protocols. This onboarding strategy directly addresses common shortcomings observed in existing micromobility apps, such as the tendency to skip informing the user about common safety procedures and rider errors. By integrating usability and legal procedures into the onboarding process, user friction is reduced and critical safety measures are enforced. Following this intuitive onboarding, the interface of the E-Block app prioritizes both user convenience and legal compliance.
We aim to support users with visual impairments or age-related vision decline by incorporating inclusive design elements such as readable fonts, voice assist integration, and color-contrast ratios. These features are an integral part of the app and directly align with our objective to maximize accessibility for micromobility.
6.1.3. Ride Performance
6.1.3.1. SENSOR TECHNOLOGIES FOR SAFETY AND REAL-TIME MONITORING (SD)
The E-Block uses advanced sensor technologies to improve safety, detect misuse, and monitor real-time conditions. A seat pressure sensor, like those in e-scooters, senses when someone sits on the vehicle without unlocking it (What Is a Weight, 2025). This sets off a loud beep, a shake, and app alerts. Tools that measure speed changes and turns monitor sudden impacts, tilts, or drops, allowing the app to notify the user or operator about potential collisions (What Is IoT, 2023).
All sensor data is sent in real-time to the IoT backend, which stores logs for crash notes, harm alerts, and maintenance requirements.
6.1.3.2. MULTI-SENSOR SUITE FOR AUTONOMOUS CAPABILITY (AM)
To enable autonomous driving, the E-Block will integrate a multi-modal sensor suite to ensure robust perception of the E-Block’s surroundings across varying environments and conditions, essential in an urban setting. Below, we have outlined the function of various sensors and discussed the advantages and disadvantages of each sensor type.
6.1.3.2.1. Light Detection and Ranging (LiDAR)
Light Detection and Ranging (LiDAR) emits laser pulses and very accurately detects the precise distance from an obstacle, such as a pedestrian or cyclist, to the vehicle, generating a high-resolution 3D point cloud. Many sources from our research recommended a LiDAR-camera fusion approach. In order for a vehicle to perform complex manoeuvres, contextual information is required, which is provided by cameras (Christensen et al., 2021).
While extremely precise, traditional LiDAR units are expensive; however, recent advancements in solid-state LiDAR have improved the durability and cost due to the reduced complexity of the design.
6.1.3.2.2. Cameras
Cameras provide critical visual data for the recognition of objects surrounding the E-Block. They enable object recognition, provide color recognition, allowing the E-Block to interpret traffic lights and signals, and facilitate texture and pattern recognition, which detects sidewalks, crosswalks, stop lines, and cracks in the pavement. Additionally, they provide 360-degree coverage of the surroundings. Compared to LiDAR and RADAR, cameras are relatively inexpensive and lightweight. However, performance drops in low light or poor weather, such as rain. This can be combated by asking users to wipe the cameras before proceeding with their journey on a rainy day (Lefkowitz, 2019).
Tesla has incorporated a camera-only system for its Full Self-Driving and Autopilot features. The E-Block could utilize this system due to its cost-effectiveness, which would promote a cheaper model for the E-Block. Additionally, without the need for bulky and unattractive laser sensors, the E-Block’s design can be made more attractive for both users and non-users. Since the E-Block will not be traveling at high speeds like cars, LiDAR will most likely not be necessary (Tara, 2023).
6.1.3.2.3. Radio Detection and Ranging (RADAR)
Radio Detection and Ranging (RADAR) uses radio waves to detect the position and velocity of objects, maintaining performance in fog, rain, and dust – conditions where cameras and LiDAR may fail. It is effective for detecting larger moving objects at long distances, which is not required for the E-Block operating in cities. Additionally, RADAR provides a very noisy output, which would reduce rider satisfaction (Inside the Sensor Suite, 2025).
Holistically considering the LiDAR, cameras and RADAR, we downsize our options to only two. Either a LiDAR-camera fusion or camera-only approach should be implemented. Both approaches are illustrated in Figures 4b and 4a respectively. Cameras have the advantages of being cheaper, smaller, and installed flush into the surface, while maintaining an accurate perception of the E-Block’s environment. However, at night, the camera will not be able to see anything, whereas LiDAR will still be able to detect objects. Low-profile lighting, which switches on at night, could be installed on the bottom of the E-Block to overcome this issue with the camera-only approach.
6.1.3.2.4. Ultrasonic Sensors
Ultrasonic sensors operate at short range and are ideal for parking assistance, navigating congested areas, and close-range obstacle detection, such as curbs and pedestrians. They are low-cost and crucial for low-speed maneuvers (Hasanujjaman et al., 2023).
6.1.3.2.5. GPS and IMU
GPS provides global positioning using satellite signals for navigation and route planning. At the same time, the IMU (Inertial Measurement Unit) tracks vehicle motion – acceleration and rotation – improving accuracy when GPS signals are weak, as it is not reliant on external signals.
6.1.3.3. RIDE RECORDINGS (EO)
Ride recordings will be available on the E-Block app for five days post-ride. These recordings will support rider accountability and insurance processes for crash or tampering cases.
6.1.4. Automation (AM, SD)
It is important to understand the different levels of autonomy when designing autonomous micromobility. The E-Block is designed to operate at Level 4 (L4) autonomy, meaning it can perform all driving functions without human intervention, but only within specific, predefined geofenced areas. While the E-Block will operate independently within these areas, a manual override function will be available to users in case of emergencies, dropping personal items, or personal preference to pause or reroute. For more information on the different levels of autonomy, refer to imaginationtech.com’s “What Are The Six Levels Of Autonomous Driving Technology?” titled article.
To inform the design of the E-Block, we examined current autonomous micromobility technologies, including Honda’s CiKoMa and WaPOCHI, University of Maryland’s self-driving e-scooters, and Starship Technologies’ delivery robots (Our Robots, n.d.; Striving to Realize, n.d.).
Honda’s autonomous micromobility demonstrates the evolution of self-driving systems and the growing trend toward mapless autonomous navigation where the E-Block’s environment is perceived in real-time. The E-Block could benefit from mapless technology due to the increased flexibility and adaptability to changes in the vehicle’s environment (e.g construction, road accidents). Rather than depending on pre-loaded high-definition (HD) maps, mapless systems use cameras and sensors to actively interpret their surroundings (detecting roads, pedestrians, cyclists, other vehicles and obstacles) to determine viable paths, closely mimicking human cognition and decision-making. However, traditional map-based systems offer more accuracy and reliability. This precision may be essential for urban environments where the E-Block will operate; however, the cost-effectiveness and lack of dependence on external infrastructure of mapless technology has its advantages, allowing for a cheaper model. Hybrid models are also a potential with the current advancements in AI, where the E-Block’s navigation will have the reliability of map-based systems as well as the adaptability of mapless technologies (Navigating the Future, 2024).
6.1.5. Drive Modes (AN)
In addition to L4 autonomy, the E-Block can also operate at L1-3 as it has three adaptive modes (including Fully Autonomous Mode, which is L4) (Nurliyana et al., 2023; What Are The Six Levels, n.d.):
- Manual Mode lets the user take full control. Suited for experienced riders.
- Semi-Autonomous Mode has features such as self-braking, speed limits, and speed control. Suited for all riders.
- Fully Autonomous Mode is specifically designed for controlled environments. Since the E‑Block will mainly be used for intra-city travel, hazards such as pedestrians, other micromobility and transport vehicles pose greater threats in case of collision. The speed of the E‑Block has to be regulated in certain areas, such as school zones and notably crowded areas. This will be achieved via geofencing.
Mode selection can be automatic, utilizing AI that analyzes rider history, location, and preferences, or manual (See Step 3.8.1).
6.1.6. Speed Switching Based on Rider Profile or Location Logic (AN)
The E‑Block will mainly be used intra-city; due to this, hazards present, like moving pedestrians, can pose greater threats in case of a collision. The German trauma-centre study observed that their city’s speed limit was set at 20 km/h and overall found that most e‑scooter injuries were low in severity (AIS/ISS), possibly tied to the local speed cap (Graef et al., 2021). The E‑Block will use a dual modality speed regulation system based on user geofencing and profile.
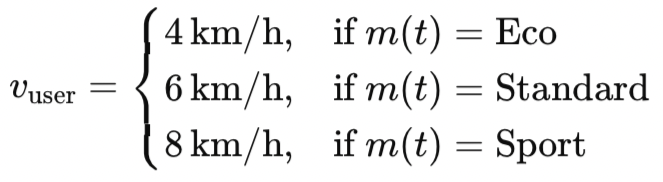
Users may pre-select a ride tier according to their comfort, experience level, and risk tolerance: Eco, Standard, or Sport (See Step 3.8.1 in HTA).
Let m() ∈ {Eco, Standard, Sport} be the selected mode.
Define:
Mode switching occurs under a rule-based supervisory controller, which may recommend changes based on:
Where:
- R(t) : real-time risk index (based on zone type, user history, crowd density)
- L(t) : ambient light sensor value
- Θ, γ : context-defined thresholds
The legal requirements and the implications for speed are as follows:
- UK: Trial rentals are capped at 15.5 mph (25 km/h).
- US: Common speed limits range from 15-20 mph (varies by state).
- Europe: EU caps speeds at 25 km/h (15.5 mph).
- Implication: The E‑Block uses software-based configurable speed limits and geofencing to comply with local maximums.
6.1.7. Batteries (AM)
There is much research going on into developing new energy storage technology, such as solid-state batteries, to increase energy density, safety, and design, as well as decrease charging times. The E-Block design and shape provide space for a large battery necessary for a large power output. In the case of a breakthrough in solid-state batteries, the E-Block could utilize this technology to enhance its safety and efficiency. Solid-state batteries still have an anode and a cathode; however, instead of a liquid electrolyte, they have a solid electrolyte.
The benefits of solid-state batteries over traditional lithium-ion include higher energy density, faster charging times, increased safety, longer lifespan, and a lighter, more compact design. Solid-state batteries have double the energy density of traditional lithium-ion batteries; however, they are still very heavy. They increase safety because the removal of the liquid electrolyte reduces the risk of leaks and fires. Additionally, the separation between the anode and cathode is more reliable, decreasing the likelihood of short circuits. The solid electrolyte prevents rapid dendrite formation due to its higher mechanical strength compared to liquid electrolytes. Dendrites are needle-like structures of lithium metal that can connect the anode and cathode, causing a short circuit. Furthermore, there is no need for bulky cooling or heating systems, allowing for a more compact and lightweight design, which would allow for more storage space in the E-Block for the rider’s personal items. However, there are a few practical barriers with solid-state batteries, such as finding the correct atomic composition of the electrolyte, as well as interface instability and higher manufacturing costs (Vadhva & Nagaveykar, n.d.).
Figure 6 illustrates the differences between the compositions of solid-state batteries and lithium-ion batteries.
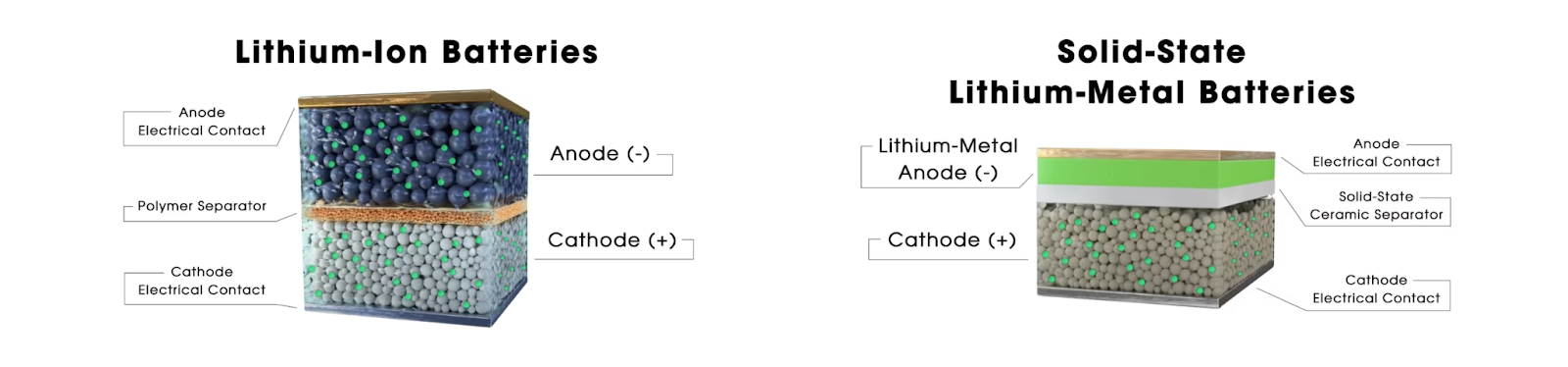
Figure 6. (Solid-state Batteries, 2022).
6.1.8. Charging (EO)
Wireless charging is a promising solution for enabling autonomous micromobility systems like the E-Block to operate efficiently with minimal human intervention. Triviño-Cabrera et al. (2023) developed and validated a real-world wireless charger prototype for e-scooters. Their system employed magnetic resonant coupling, integrated ferrite tile layouts, and implemented a CC-CV (Constant Current–Constant Voltage) control scheme to support safe and efficient battery charging across various charge states.
Unlike earlier designs, this prototype was modeled on a physical e-scooter using finite element analysis (FEA), allowing accurate optimization of coil placement and electromagnetic compatibility. The resulting configuration achieved 94.7% AC transmission efficiency and required no additional structures beyond minor modifications to standard e-scooter stands. The inclusion of radial ferrite tile layouts helped reduce weight and cost while maintaining high coupling efficiency.
Similarly, for the E-Block, we aim to install wireless charging stations across the city, which are designed according to the specifications of Triviño-Cabrera et al.’s research. Such a system will allow the E-Block to return and recharge without requiring cables, docks, or maintenance staff.
6.1.9. Location-Based Geofencing (AN)
The system integrates GPS and city zoning data to restrict speeds dynamically near sensitive zones (See Step 4.5.1 in HTA).
6.1.9.1. DYNAMIC SPEED CONSTRAINT FUNCTION (AN)
Below is the dynamic speed constraint function used for restricting the speed of the E-Block:
v _allowed (t) = min [ v _user , v _geo (x(t), y(t)), v _env (w(t)), v _sys (s(t)) ]
Where:
- v _allowed (t) : maximum speed permitted at time t
- v _user : speed cap defined by user-selected mode (Eco, Normal, Sport)
- v _geo (x(t), y(t)) : geofenced limit based on real-time location (x, y)
- v _env (w(t)) : environment-dependent limit (weather w(t) : rain, fog, etc.)
- v _sys (s(t)) : internal system constraints (battery, braking status, throttle calibration)
The legal requirements for road and sidewalk access are as follows:
- UK: Micromobility vehicles cannot be ridden on sidewalks; trials require use on roads and bike lanes.
- US: Varies by city; some allow sidewalks with reduced speeds.
- Europe: Most countries prohibit sidewalk use; bike lanes are preferred.
6.1.10. Anthropometrics (AM)
The standard hip width for both men and women is around 40 cm, so our E-Block’s seat must be at least 40 cm in width to ensure the comfort of all riders. The width must also consider the width of the wheels, the storage space inside the E-Block, and the battery. Additionally, the E-Block must have a height of at least 65 cm to ensure that the rider’s feet are not dragging on the floor, as the standard sitting knee height for men is around 60 cm, and for women it is around 56 cm (Anthropometric Data, 2006; Anthropometric Data, 2020).
In the UK, where the E-Block is based, the average weight of men is 85 kg, and women 72 kg; therefore, for our E-Block to accommodate all users, it has to be able to withstand a weight of over 100 kg. Further research is needed on the materials and framework required to withstand such a weight (Health Survey, 2022; Stewart, 2024).
According to the National Institute of Health (NIH), the mean head circumference is approximately 55 cm. Each complementary helmet should have an adjustable width (approximately between 52 cm and 58 cm) to accommodate all users.
6.1.11. Hygiene
6.1.11.1 USER PERCEPTION AND BEHAVIORAL BARRIERS (SD)
Cleanliness has become a key factor in maintaining user trust in shared small ride services, especially following the COVID-19 pandemic (Štefancová et al., 2022). Studies reveal that users skip shared helmets and bikes due to fear of germ spread and poor hygiene practices (Frizziero et al., 2024). To overcome this issue, we plan to add a wet wipe box in the storage space of the E-Block (See Step 3.6.2.3).
The app instructs riders to wipe the helmet and ensure it is visibly clean for the next person’s use (See Step 3.6.2).
By implementing hygiene features and tracking compliance via the E-Block app, we aim to improve our users’ confidence in our hygiene practices (Bozzi & Aguilera, 2021).
6.1.11.2 SCIENTIFIC EVIDENCE AND DESIGN (AN)
A study conducted by researchers in Lagos, Nigeria in 2024 found that shared motorcycle helmets harboured antibiotic-resistant bacteria such as Staphylococcus aureus, Bacillus anthracis, and Escherichia coli (Balancing Injury, 2022).
To combat this problem we can use an automated dispatch/ozone-based sanitization system,which was published in a study in Heliyon (Frizziero et al., 2024). This system is designed for shared bike helmets. The system effectively removes dust and pathogenic bacteria, demonstrating a viable approach to improving hygiene in shared helmet use scenarios.
6.1.11.3 HELMET DOCK DISINFECTION PROTOCOL (AN)
The E‑Block will use the helmet dock, which initiates a disinfection cycle post-ride, using ozone or UV‑C light (260-280 nm). UV‑C exposure has been shown to eliminate over 99.99% of pathogens on surface contact (Raeiszadeh & Adeli, 2020; Frizziero et al., 2024).
6.1.11.4 PROTECTIVE HYGIENE LINERS (AN)
To take additional precautions, the E‑Block will have a compartment containing recycled disposable hygiene liners. These will be worn beneath shared helmets and are a proven way to reduce the risk of lice, dandruff, sweat transfer, and bacterial cross-contamination.
6.1.11.5 TRUST SIGNALS AND USER EMPOWERMENT (AN)
To promote user transparency and trust signals, the app will have a button called “Sanitize” with a timestamp, offering visible assurance to users
6.2. Commercial Considerations and Inclusive Access
6.2.1. Estimated Rental Pricing for Users (AN)
To set a realistic rental price target for the E-Block, we analyzed the pricing models of popular existing UK shared micromobility companies. Figure 7 shows that the median unlock cost for shared scooters around the UK is £1.00, while the median price per minute cost is approximately £0.15 (O’Brien, 2020). According to this pricing, a 15-minute trip costs approximately £1.80-£4 for a user in the UK.
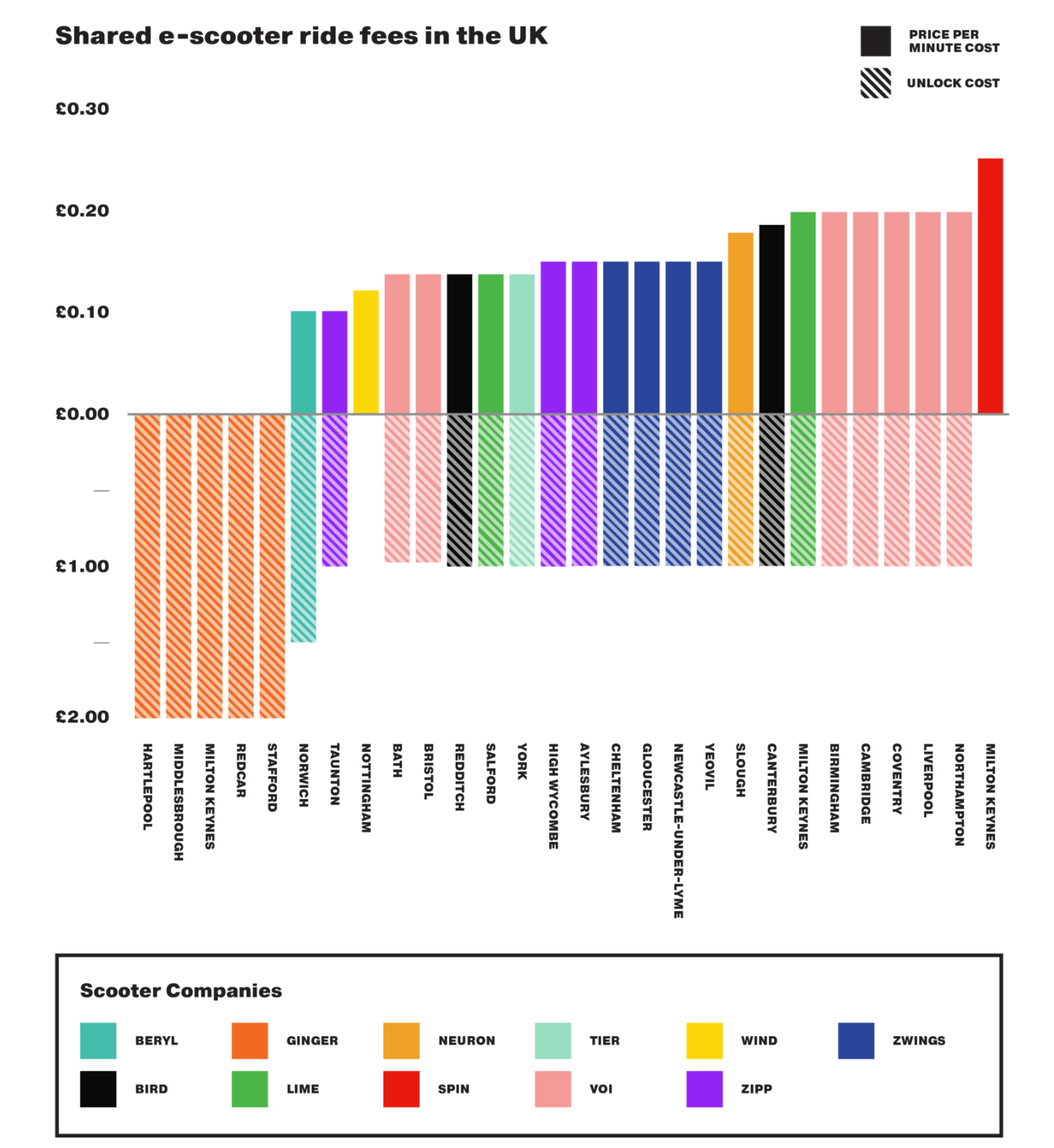
Figure 7. (O’Brien, 2020).
To estimate a realistic operational cost for the E-Block, we analyzed the pricing models of popular existing UK shared micromobility companies. We found the following:
- Bird Gen‑4 and Lime Gen‑4 cost approximately US $1,000 per unit to manufacture and assemble.
- Deployments typically amortize hardware costs to around $200–$300 per unit, assuming bulk production and volume discounts.
- E‑Block’s modular design – featuring an aluminum frame, onboard hygiene/helmet systems, and camera sensors – is expected to cost about US $250–300 per unit in production.
We aim to keep the E-Block’s rental prices in this range, even with its various added features that were mentioned in the previous sections. The main operational costs of the E-Block are as follows:
- Charging costs: At home in the United Kingdom of Great Britain, electricity averages £0.34 per kWh, making a full charge of a 0.5 kWh battery approximately 17 pence. Daily charging (30 times per month) costs about £5.10 per month (How Much, 2025).
- Maintenance and fleet costs: E‑scooters require minimal routine servicing; they do not demand expensive inspections. Typical upkeep includes brake pads, tire replacement, and occasional repairs.
6.2.2. Design and Operational Choices for Affordability (SD)
Although shared micromobility vehicles such as e-scooters and e-bikes are preferred by many, cities that have adopted micromobility systems now struggle to keep them affordable and in use. Investing in a personal e-bike or scooter isn’t more affordable for the user either. The initial cost, combined with the added maintenance costs and the risk of theft, discourages potential users.
The E-Block provides a solution for potential users facing this dilemma. It is designed to maximize safety, comfort, and cleanliness without the added cost.
When designing the E-Block and choosing the materials and systems for it, affordability was a great consideration. We chose not to include hard or rare materials in the design. Rather, more affordable materials such as marine-grade vinyl, EVA foam, and basic metal were preferred (The Comfort, Nocerini, 2022).
To reduce operational costs, we incorporated self-return-to-charge technology, eliminating the need for labor-intensive collection. Our setup also suggests the use of wireless charging stations. Combined with longer-lasting solid-state battery compatibility, these features reduce downtime, staff costs, and environmental waste. All of which contribute to keeping rentals affordable.
To reduce overall waste, we made sure the E-Block could be disassembled easily. The frame, made of aluminum, can be recycled. If seat pads or sensors wear out, they can be replaced without needing a new vehicle. This aligns with the circular approach to making things, a method commonly used in creating small mobile units (Severengiz et al., 2020).
The legal requirements and implications for insurance and registration are as follows:
- UK: Trial scooters include operator-provided insurance; private use on public roads is illegal.
- US: Insurance generally not required under certain power/speed limits; exceeding these may require registration.
- Europe: Some countries (e.g., Germany, France) require liability insurance and visible identification numbers.
- Implication: Offer optional insurance packages and document upload features where required.
7. Design Optimisation with Human-Centered Focus
7.1. Software Architecture and Functionality (AM)
The E-Block will require an integrated software architecture capable of processing data from multiple sensors: input from cameras, LiDAR, and ultrasonic sensors. If mapless technology is used, the software will need to process real-time sensor and camera data for adaptive decision-making. If not, advanced software is required to interpret pre-generated high-definition (HD) maps to plan optimal routes, focusing on safety and efficiency, and incorporating traffic rules and infrastructure data.
The system must also process user inputs – such as destination changes, stop requests, or alternate routes – and convert them into real-time commands for the vehicle’s actuators. Actuators convert electrical signals into mechanical actions such as steering, acceleration, and braking. Additionally, predictive algorithms can anticipate the behavior of nearby road users (e.g., pedestrians, cyclists, vehicles), allowing the E-Block to adjust its path to minimize risk.
To support real-time updates and connectivity, the E-Block may utilize 5G V2X (Vehicle-to-Everything) communication, which enables data transmission with other vehicles (V2V), infrastructure (V2I), and pedestrians (V2P), thus enhancing safety and efficiency (Vehicle-to-Everything (V2X), 2019).
7.2. User Satisfaction and Comfort Features (AM)
7.2.1. Cushioned Backrest Feature
For extra comfort, the E-Block has a backrest. This backrest can be pushed back into the block when not in use by a rider, just like the handles/armrests. To increase rider satisfaction even further, the backrest will feature a comfortable, waterproof, easily cleanable, lightweight, durable, and compact cushion that fits neatly into the slit when not in use. We researched the best materials for this cushion: an EVA foam core with a marine-grade vinyl outer layer. The vinyl is waterproof, UV-resistant (prevents cracking or fading), stain-resistant, durable, tear-resistant, and is easily wiped clean and maintained. The closed-cell EVA foam is lightweight, shock-absorbing, waterproof, and mildew-resistant. Both these materials are made for harsh and wet outdoor environments, ensuring durability outdoors in an urban setting. They have been used in similar applications, such as e-scooter seats, wheelchairs, and boat seats, so their suitability is proven. The design can be made compact/thin while still meeting the requirements (The Comfort, 2023; Fox, 2025; Nocerini, 2022).
7.2.2. Incentives, Footrest, and Personalization
Riders can receive a discount by leaving the E-Block near a charging bay, which will be strategically placed throughout the city. A celebration animation will play in the app if this is done. This promotes sustainable and responsible usage of the E-Block by minimizing the time it spends depleting the battery’s charge without an actual rider.
A foot rest, which can be pushed back into the block to resume its compact cube shape, is available for the rider, for comfort. To further enhance user experience, features such as LED lights could be added, with the user being able to choose the colour of the lights through the E-Block app, making their experience more enjoyable and personalized.
7.3. Environmental Impact (AN)
Traditional public transport vehicles like cars and motorbikes emit a large amount of carbon dioxide. The E-Block emits zero carbon dioxide while driving. Many individuals continue using these high-emission transport vehicles for short-distance trips either out of convenience or due to the lack of alternative options.
A Monte Carlo analysis estimated the average life cycle global warming impact of shared e-scooters at 202 g CO₂-eq per passenger-mile, primarily driven by manufacturing (50%) and daily collection for charging (43%). The study found that emissions could be reduced to:
- 177 g CO₂-eq by using fuel-efficient collection vehicles,
- 164 g CO₂-eq by collecting only low-battery scooters, and
- 147 g CO₂-eq by minimizing collection distances.
Notably, extending scooter lifespan to two years decreased emissions to 141 g CO₂-eq per passenger-mile (Hollingsworth et al. ,2019).
According to a specialist data analytics company in the United Kingdom of Great Britain, as of February, there are approximately 42.5 million full driving licence holders in the United Kingdom of Great Britain: 42,500,000 × 415 = 17,637,500,000 grams = 17,637.5 tonnes of carbon dioxide emitted from car travel in the United Kingdom of Great Britain alone, excluding the carbon dioxide released in the production of cars (Roe, 2025).
Figure 8 shows the life cycle assessment of shared e‑scooters. The image reports a baseline of 77 g carbon dioxide per passenger-kilometre, with 63% of emissions attributed to manufacturing – particularly aluminum and battery production. While the E‑Block emits zero during vehicle use (driving), lifecycle emissions still arise from battery production and charging. Assuming a similar manufacturing process but improved battery chemistry and extended lifespan, the E‑Block is expected to achieve a lower overall lifecycle footprint compared to the industry baseline of 77 g carbon dioxide averaged over the E-Block’s entire usable life.
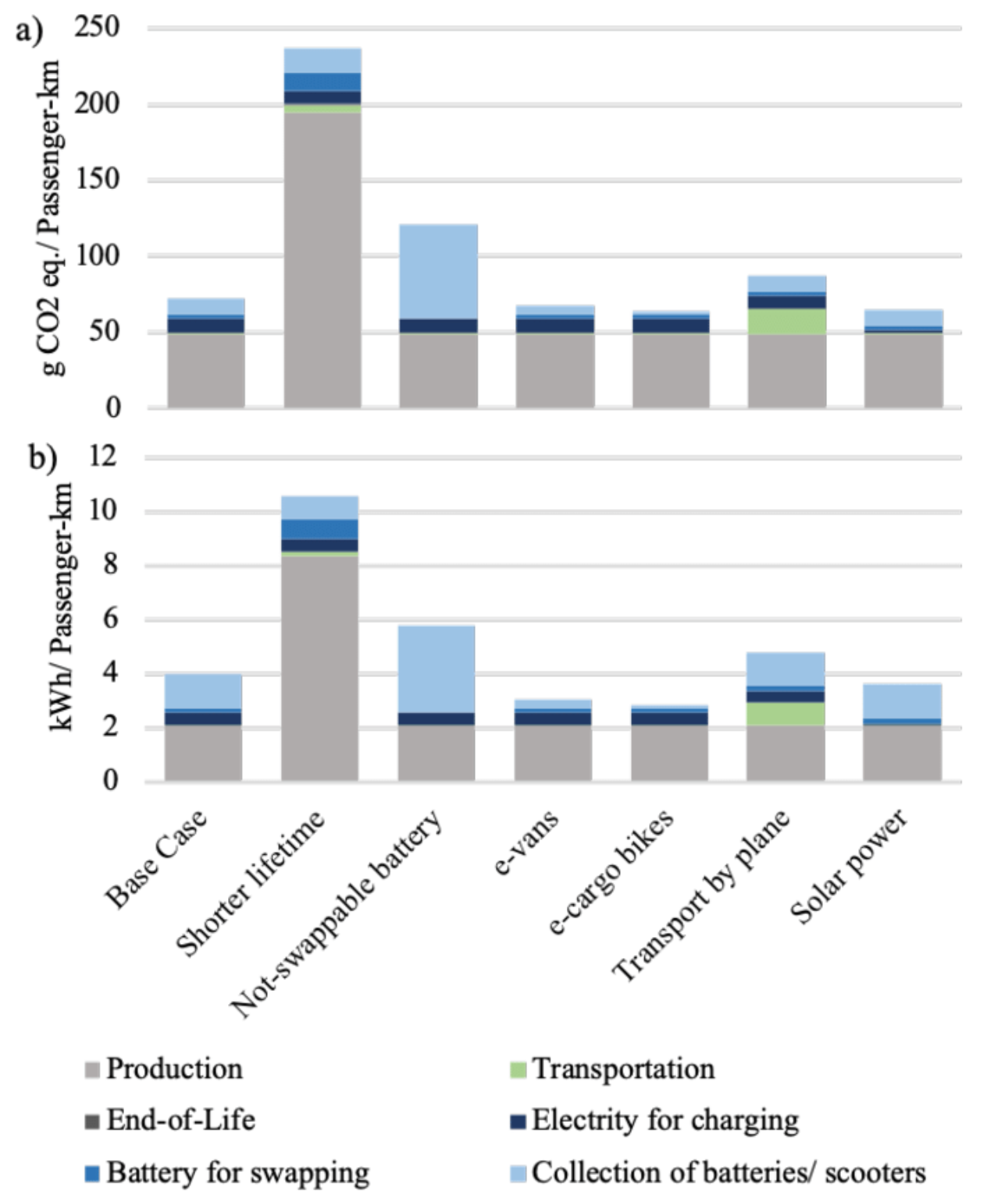
Figure 8. (Severengiz et al., 2020).
The E‑Block will have the following improvements, which are expected to lower its carbon dioxide emissions during production and use compared to traditional short-distance transport vehicles such as cars and motorbikes:
- Improved battery architecture and production: A meta-analysis shows that current lithium-ion battery production emits around 17.6 kg carbon dioxide on average, and that emissions drop significantly with cleaner electricity mixes and manufacturing scale-up. Opting for LFP battery chemistry or recycled cathode materials can cut battery production emissions by 30-50% compared to conventional NMC/NCA cells (Clemente et. al., 2025). Therefore, E‑Block prototypes use modular Li-ion batteries designed for high energy density and long lifespan (~1 kWh per unit) to reduce both production and operational emissions.
- Extended vehicle and battery lifespan: Shared micromobility life cycle assessments show lifespan as the most critical variable: doubling fleet service life can cut lifecycle emissions by 30-50%, and a lifespan of 180 days versus 45 days may reduce emissions by up to 80%. Using this insight, the E‑Block targets robust hardware and modular components (including durable batteries and aluminum frames) to maximize operational life, with a projected service life of 24+ months, minimizing frequent replacement emissions.
- Circular battery management and recycling: Lime’s 2025 partnership with Redwood Materials enables 95-98% recovery of critical battery materials (nickel, cobalt, copper), re-integrated into the value chain, reducing raw-material impact in new units. This closed-loop system helps reduce cradle-to-gate carbon emissions and supports E‑Block’s circular economy goals.
- Demand-side controls and renewable charging: Electric vans are used for battery swapping trips and these vans are charged with solar power. As assumed in battery swapping with E-Vans (incl. solar power), the GWP drops by 61% to 20 g CO2-eq./pkm compared to base case (standard electricity mix). This reduction can be achieved because the emission factor of the electric service vehicle (55 g CO2-eq./km) is significantly lower than the emission factor of diesel vans (386 g CO2-eq./km) (Schelte et al., 2021).
Figure 9 compares GWP across scenarios, highlighting the impact of vehicle type, charging method, and usage patterns.
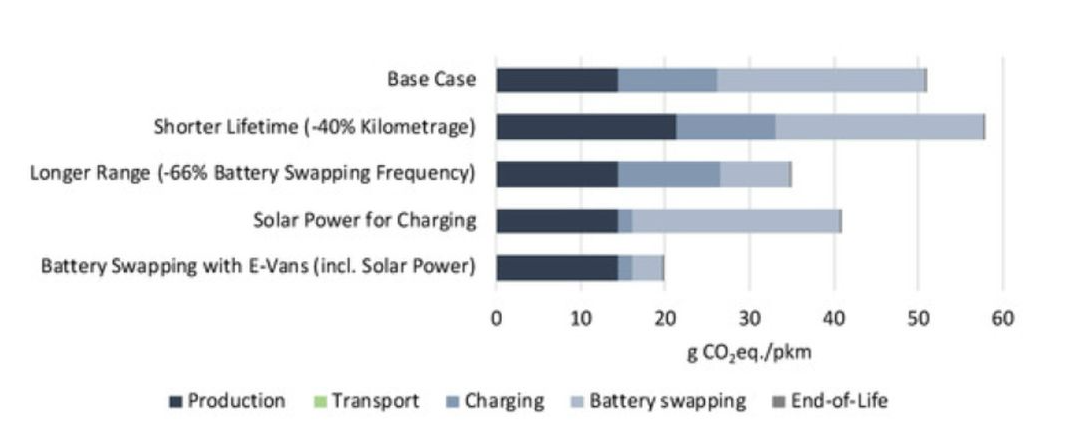
Figure 9. (Schelte et al., 2021).
8. Results and Discussion (AM)
Understanding the public’s view on autonomous micromobility is essential for designing the E-Block. It is equally important to consider the experience of non-users, as well as users, to ensure everyone has a positive experience with the E-Block. From our research, it was concluded that people have an overall positive attitude towards autonomous micromobility, particularly because of it being perceived as environmentally-friendly; however, they also share some concerns: irresponsible riding, conflicts over space, safety, vandalism, cluttering, and improper parking. Many have concerns over how users of autonomous micromobility would interact with non-users.
The E-Block combats most of these issues and concerns. It assists cities in reducing clutter from large, scattered micromobility, like scooters and bikes, that pose as trip hazards, take up a lot of pavement space, and pollute the city’s landscape. Scattering is reduced as the E-Block is able to return itself to the nearest charging station, clearing up space on pavements. Its minimalistic, compact and sophisticated design ensures it will fit in a city environment, decorating the landscape instead. Using geofencing, we are able to restrict where the E-Block can travel, thereby preventing access to areas such as shop entrances and garages, improving the experience of non-users.
As discussed in this report, the E-Block has many features such as helmet-lock and fail-safe systems to improve safety. Furthermore, the E-Block will not travel at a great speed, reducing the likelihood of collisions with other road users. The implementation of numerous sensors and cameras makes collisions with other road users extremely unlikely (An et al., 2023; Schneble & Shaw, 2021).
9. Limitations (JM)
While designing the E-Block, we aimed to push the boundaries of micromobility through smart, sustainable, and innovative solutions centered on the comfort and security of the user. Still, the following advanced features could not be implemented in this first phase of the E-Block due to clear limitations in time, budget, and the depth of available exploration or specialized expertise:
- Biometric fit system: The biometric fit system was planned to enhance the anti-theft system of the E-Block and user personalization through fingerprint or facial recognition. Vehicle systems use ECUs, secure chips, and immobilizers for the same purposes. Still, the development of a fast biometric system specifically custom-made to the E-Block’s compact design would need significant investment, custom circuitry, and cybersecurity protocols. Limited access to advanced factors and an initial low budget during the prototyping phase prevented us from moving forward with this incorporation (Kiruthiga et. al., 2015).
- Solar charging: We also explored the integration of solar charging, aiming to reduce dependence on traditional electricity charging by incorporating photovoltaic panels into the vehicle’s surface. This could enable passive recharging during inactive times, making the E-Block more sustainable. Still, as studies show, the combination of electric vehicles and solar power introduces challenges to distribution network stability, including bidirectional current inflow and voltage oscillations (Talbi et. al., 2024). Addressing these issues demands in-depth simulation, battery optimization, and adherence to power regulation norms that exceed our current timeframe and funding. As portable solar charging technology is too expensive, this too is non-viable (Oluwalana et. al., 2025).
- AI-based crash prediction: Another promising point was AI-based crash prediction, real-time data, and machine learning. The goal was to integrate predictive algorithms to enhance user safety. Techniques such as Gradient Boosting Machines and resampling methods like RUS or SMOTE have shown excellent results in imbalanced crash datasets (Sakib et al., 2024). Yet, due to the E-Block’s current computational limitations, absence of a detector suite, and lack of labeled crash datasets, we were unable to implement this point beyond abstract design.
- Multilingual voice prompts: Eventually, we intended to include multilingual voice prompts for improved human-system integration. AI-powered interfaces are increasingly being used in independent vehicles to offer real-time guidance and commerce in multiple languages. Still, voice interface systems bear robust NLP models, high-quality audio tackle, and significant processing power. None of which are plausible within our current development constraints.
9.1. Roadmap for Future Work (JM)
- Foundation (6 months): Secure funding and partnerships. Integrate improved hardware such as: processors, solar panels, sensors.
- Integration (1 year): Develop and test the improvement points: biometric access, solar charging, multilingual voice prompts and crash prediction models.
- Optimization (1 year and 6 months): Do a unified smart system with all the improvement points, implement multilingual voice prompts, and begin pilot testing.
10. Conclusion (AN, contribution by EO)
This study uses the E-Block to draw attention to the shortcomings of existing micromobility vehicles and propose solutions for their improvement. By integrating principles of user-centered design, accessibility, safety, and sustainability, the E-Block reinvents an inclusive, autonomous and affordable shared micromobility vehicle. The E-Block has several new features that aren’t usually seen in the traditional micromobility vehicles such as app-linked helmet lock, automatic hygiene module, video-triggered incident logging, and dynamic speed adaptation. These innovations address both user experience and systemic challenges.
In designing the E-Block we considered the following main aspects:
- User requirements and user safety: Improved by enforcing helmet compliance, anthropometrics, location based geofencing, speed switching modes, affordable pricing and efficient charging of the battery.
- Post-pandemic (COVID-19) hygiene: The E-block contains disposable head liners to be worn under the helmet and wet wipes to clean the e-block.
- Institutional trust and liability reduction: Supported through audit-ready video systems and insurance-enforced app flows.
- Environmental impact: Significantly reduced by smart routing, energy-efficient battery policies, environmentally-friendly materials, and reduced rebalancing needs.
While several advanced features allow for future developments, the current design demonstrates the potential of what shared micromobility can become.
Bibliography
An, Z., Mullen, C., Zhao, C., & Heinen, E. (2023). Stereotypes and the public acceptability of shared micromobility. Travel Behaviour and Society, 33, 100643. https://doi.org/10.1016/j.tbs.2023.100643.
Anthropometric data [Table; PDF]. (2006, April 21). https://multisite.eos.ncsu.edu/www-ergocenter-ncsu-edu/wp-content/uploads/sites/18/2016/06/Anthropometric-Detailed-Data-Tables.pdf.
Anthropometric Data for U.S. Adults [Table]. (2020). The Ergonomics Center. https://ergocenter.ncsu.edu/wp-content/uploads/sites/18/2020/07/Anthropometry-Summary-Table-2020.pdf.
Balancing injury prevention and infection risk in helmet sharing. (2022, July 22). Ashe News. Retrieved August 2, 2025, from https://ashenewsdaily.com/media-pr-journalism/balancing-injury-prevention-and-infection-risk-in-helmet-sharing/.
Bozzi, A. D., & Aguilera, A. (2021). Shared e-scooters: A review of uses, health and environmental impacts, and policy implications of a new micro-mobility service. Sustainability, 13(16), 8676. https://doi.org/10.3390/su13168676.
Calan, C., Sobrino, N., & Vassallo, J. M. (2024). Understanding life-cycle greenhouse-gas emissions of shared electric micro-mobility: A systematic review. Sustainability, 16(13), 5277. https://doi.org/10.3390/su16135277.
Christensen, H., Paz, D., Zhang, H., Meyer, D., Xiang, H., Han, Y., Liu, Y., Liang, A., Zhong, Z., & Tang, S. (2021). Autonomous vehicles for micro-mobility. Autonomous Intelligent Systems, 1(1). https://doi.org/10.1007/s43684-021-00010-2.
Clemente, M., Maharjan, P., Salazar, M., & Hofman, T. (2025). Meta-analysis of Life Cycle Assessments for Li-Ion Batteries Production Emissions. arXiv preprint arXiv:2506.05531.
The comfort and durability of EVA foam seats: Benefits and applications. (2023, November 30). Foam Creations. Retrieved August 2, 2025, from https://foamcreations.com/en/news/the-comfort-and-durability-of-eva-foam-seats-benefits-and-applications.
Fox, D. (2025, April 5). Top 7 durable fabrics for outdoor cushion covers: A comprehensive guide. Team Covers. Retrieved August 2, 2025, from https://www.foamandcovers.co.uk/post/top-7-durable-fabrics-for-outdoor-cushion-covers-a-comprehensive-guide?srsltid=AfmBOopQp_UsFEb7hA2xlKkJvaH3a8cXH_eMbuePEHM4vL0yFdJLcEVT.
Frizziero, L., Donnici, G., Venditti, G., & Freddi, M. (2024). Design of an innovative sanitation system for bike-sharing service. Heliyon, 10(4), e26595. https://doi.org/10.1016/j.heliyon.2024.e26595.
Goralzik, A., König, A., Alciauskaite, L., & Hatzakis, T. (2022). Shared mobility services: An accessibility assessment from the perspective of people with disabilities. European Transport Research Review, 14(1). https://doi.org/10.1186/s12544-022-00559-w.
Graef, F., Doll, C., Niemann, M., Tsitsilonis, S., Stöckle, U., Braun, K. F., Wüster, J., & Märdian, S. (2021). Epidemiology, injury severity, and pattern of standing e-scooter accidents: 6-Month experience from a german level I trauma center. Clinics in Orthopedic Surgery, 13(4), 443. https://doi.org/10.4055/cios20275.
Hasanujjaman, M., Chowdhury, M. Z., & Jang, Y. M. (2023). Sensor fusion in autonomous vehicle with traffic surveillance camera system: Detection, localization, and AI networking. Sensors, 23(6), 3335. https://doi.org/10.3390/s23063335.
Hayden, S., & Spillar, R. (2019). Dockless electric scooter-related injuries study. Austin Public Health.
Health Survey for England, 2021 part 1, Part 4: Trends. (2022, December 15). NHS England. Retrieved August 2, 2025, from https://digital.nhs.uk/data-and-information/publications/statistical/health-survey-for-england/2021/part-4-trends.
Hollingsworth, J., Copeland, B., & Johnson, J. X. (2019). Are e-scooters polluters? The environmental impacts of shared dockless electric scooters. Environmental Research Letters, 14(8), 084031. https://doi.org/10.1088/1748-9326/ab2da8.
How much does it cost to charge an electric scooter in the UK? (2025, April 8). Ride Zero. Retrieved August 2, 2025, from https://ridezero.co.uk/blogs/news/how-much-does-it-cost-to-charge-an-electric-scooter-in-the-uk
Inside the sensor suite: How cameras, LiDAR, and RADAR work together in autonomous cars. (2025, April 22). DPV Transportation. Retrieved August 2, 2025, from https://www.dpvtransportation.com/sensor-suite-autonomous-vehicle-sensors-cameras-lidar-radar/
Jaber, A., Hamadneh, J., & Csonka, B. (2023). The preferences of shared micro-mobility users in urban areas. IEEE Access, 11, 74458-74472. https://doi.org/10.1109/access.2023.3297083.
Kiruthiga, N., Latha, L., & Thangasamy, S. (2015). Real time biometrics based vehicle security system with GPS and GSM technology. Procedia Computer Science, 47, 471-479. https://doi.org/10.1016/j.procs.2015.03.231.
Lefkowitz, M. (2019, April 22). New way to ‘see’ objects accelerates future of self-driving cars. Cornell Chronicle. Retrieved August 2, 2025, from https://news.cornell.edu/stories/2019/04/new-way-see-objects-accelerates-future-self-driving-cars.
Madapur, B., Madangopal, S., & Chandrashekar, M. N. (2020). Micro-mobility infrastructure for redefining urban mobility. European Journal of Engineering Science and Technology, 3(1), 71-85.
Navigating the future: Mapless vs map-based autonomous driving. (2024, August 26). Counterpoint. Retrieved August 4, 2025, from https://www.counterpointresearch.com/insight/navigating-the-future-mapless-vs-map-based-autonomous-driving
Nocerini, S. (2022, April 26). Pros & cons of marine grade vinyl fabrics. All Vinyl Fabrics. Retrieved August 2, 2025, from https://www.allvinylfabrics.com/2022/04/26/pros-cons-of-marine-grade-vinyl-fabrics/?srsltid=AfmBOopaqomtMP3sXyQUl712-uKOV_JMGULrGnV7O00m0jefdT8z8DDu.
Nurliyana, C., Lestari, Y. D., Prasetio, E. A., & Belgiawan, P. F. (2023). Exploring drivers’ interest in different levels of autonomous vehicles: Insights from java island, indonesia. Transportation Research Interdisciplinary Perspectives, 19, 100820. https://doi.org/10.1016/j.trip.2023.100820.
O’Brien, O. (2020, November 22). All shared e-scooter pricing in the UK: charted. Zag Daily. Retrieved August 2, 2025, from https://zagdaily.com/trends/all-shared-e-scooter-pricing-in-the-uk-charted/.
Oluwalana, O. J., & Grzesik, K. (2025). Solar-Powered electric vehicles: Comprehensive review of technology advancements, challenges, and future prospects. Energies, 18(14), 3650. https://doi.org/10.3390/en18143650.
Our robots – Starship Technologies. (n.d.). Starship Technologies. Retrieved August 2, 2025, from https://www.starship.xyz/our-robots/.
Raeiszadeh, M., & Adeli, B. (2020). A critical review on ultraviolet disinfection systems against covid-19 outbreak: Applicability, validation, and safety considerations. ACS Photonics, 7(11), 2941-2951. https://doi.org/10.1021/acsphotonics.0c01245.
Roe, C. (2025, April 1). Who’s behind the wheel? Driving licence trends and penalty points across the UK. Apteco. Retrieved August 2, 2025, from https://www.apteco.com/insights/blog/whos-behind-wheel-driving-licence-trends-and-penalty-points-across-uk.
Rollandi, A., Papandrea, M., Bignami, F., Di Maggio, L., Günther, F., Quattrini, A., Minardi, L., Cocca, M., & Bettini, A. (2025). Inclusive micromob: Enhancing urban mobility through micromobility solutions. Smart Cities, 8(2), 69. https://doi.org/10.3390/smartcities8020069.
Sakib, N., Paul, T., Anwari, N., & Hadiuzzaman, M. (2024). Ensemble-based model to investigate factors influencing road crash fatality for imbalanced data. Transportation Engineering, 18, 100284. https://doi.org/10.1016/j.treng.2024.100284.
Schelte, N., Severengiz, S., Schünemann, J., Finke, S., Bauer, O., & Metzen, M. (2021). Life cycle assessment on electric moped scooter sharing. Sustainability, 13(15), 8297. https://doi.org/10.3390/su13158297.
Schneble, C. O., & Shaw, D. M. (2021). Driver’s views on driverless vehicles: Public perspectives on defining and using autonomous cars. Transportation Research Interdisciplinary Perspectives, 11, 100446. https://doi.org/10.1016/j.trip.2021.100446.
Severengiz, S., Finke, S., Schelte, N., & Wendt, N. (2020). Life Cycle Assessment on the Mobility Service E-Scooter Sharing. 2020 IEEE European Technology and Engineering Management Summit (E-TEMS). https://doi.org/10.1109/E-TEMS46250.2020.9111817.
Shenzhen Omni Intelligent Technology (Ed.). (2023, June 28). What is IoT solutions for micromobility? Omnismartiot. Retrieved August 3, 2025, from https://www.omnismartiot.com/News/what-is-iot-solutions-for-micromobility.html.
Solid-state batteries: The new frontier of electrification? [Image]. (2022, March 9). Flash Battery. https://www.flashbattery.tech/en/blog/how-solid-state-batteries-work/.
Štefancová, V., Kalasová, A., Culík, K., Mazanec, J., Vojtek, M., & Masek, J. (2022). Research on the impact of covid-19 on micromobility using statistical methods. Applied Sciences, 12(16), 8128. https://doi.org/10.3390/app12168128.
Stewart, C. (2024, October 16). Mean weight of individuals in England from 1998 to 2022, by gender (in kilograms) [Chart]. Statista. https://www.statista.com/statistics/333862/weight-of-individuals-by-gender-in-england/.
Striving to realize a society where each and every person can experience the joy and freedom of mobility: Honda CI micro-mobility technologies. (n.d.). Honda. Retrieved August 2, 2025, from https://global.honda/en/tech/Honda_CI_Micro-mobility/.
Talbi, B., Derri, M., Haidi, T., & Janyenne, A. (2024). Review of the integration of photovoltaic and electric vehicles on distribution network: Impacts and enhancement approaches. Procedia Computer Science, 236, 93-100. https://doi.org/10.1016/j.procs.2024.05.009.
Tara, R. (2023, October 3). Now revealed: Why Teslas have only camera-based vision. Engineering. Retrieved August 2, 2025, from https://www.engineering.com/now-revealed-why-teslas-have-only-camera-based-vision/.
Triviño-Cabrera, A., Quiró, J. C., González-González, J. M., & Aguado, J. A. (2023). Optimized design of a wireless charger prototype for an e-Scooter. IEEE Access, 11, 33014-33026. https://doi.org/10.1109/access.2023.3243958.
Vadhva, P., & Nagaveykar, P. (n.d.). What are solid state batteries and how will they shape the future of EV powertrains? DiscoverEv. Retrieved August 4, 2025, from https://www.discoverev.co.uk/features/solid-state-battery-technology-explained.
Vehicle-to-Everything (V2X) Communications. (2019, June 14). U.S. Department of Transportation. Retrieved August 2, 2025, from https://www.transportation.gov/v2x.
What are solenoid locks? (2022, Mar 28). Kerong. Retrieved August 3, 2025, from https://www.kerong.hk/post/what-are-solenoid-locks.
What are the six levels of autonomous driving technology? (n.d.). Imagination. Retrieved August 2, 2025, from https://www.imaginationtech.com/future-of-automotive/when-will-autonomous-cars-be-available/what-are-the-levels-of-autonomy-in-self-driving-cars/.
What is a weight sensor? (2025). flintec. Retrieved August 3, 2025, from https://www.flintec.com/learn/weight-sensor.
What is IoT (Internet of things). (2023, July 13). Velco. Retrieved August 3, 2025, from https://velco.tech/en/iot-to-detect-electric-bikes-crashes/.


{kind=link}